اس مثال میں ہم ایک آرڈینو اور موٹر ڈرائیور کے ساتھ ایک لکیری ایککٹیوٹر کی رفتار کو کنٹرول کریں گے۔
نوٹ: یہ ٹیوٹوریل بنیادی الیکٹرانک اصولوں ، ارڈینوو ہارڈویئر اور سافٹ وئیر کے ساتھ پہلے جانکاری حاصل کرتا ہے۔ اگر یہ آپ کا پہلی بار ارڈینو کا استعمال کرتے ہوئے ہے تو ہم تجویز کرتے ہیں کہ گوگل اور یوٹیوب کی تلاش کے ذریعہ دستیاب بہت سارے بہترین ابتدائی سبق میں سے ایک سے بنیادی باتیں سیکھیں۔ براہ کرم آگاہ رہیں کہ ہمارے پاس کسٹم ایپلی کیشنز کے لئے تکنیکی معاونت فراہم کرنے کے وسائل نہیں ہیں اور عوامی سطح پر دستیاب ٹیوٹوریلز کے باہر ڈیبگ ، ترمیم ، کوڈ یا وائرنگ آریگرام نہیں کریں گے۔
اجزاء
- 12V لکیری ایکچوایٹر
- 12V بجلی کی فراہمی
- اردوینو
- موٹر ڈرائیور
- پوٹینٹیومیٹر (اختیاری)
- کنیکشن بنانے اور آلے کو نچوڑنے یا سولڈرنگ لوہے کے ل Electric بجلی کے تاروں
وائرنگ
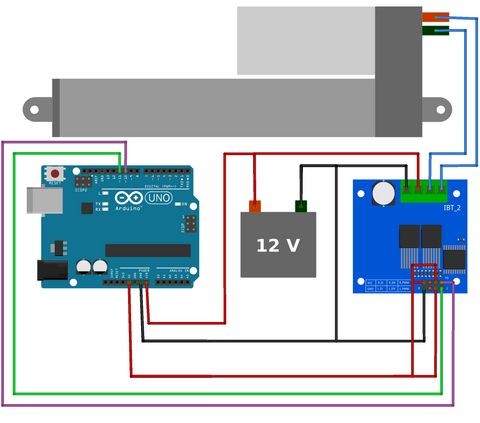
ہارڈ ویئر اور سافٹ ویئر کا جائزہ
لکیری ایکچوایٹرز میں ڈی سی موٹروں کو ایک اعلی موجودہ (5A تک) کی ضرورت ہوتی ہے ، اگر ہم لینری ایکچوایٹر کو براہ راست آرڈینو سے مربوط کریں تو یہ اعلی موجودہ ڈرا آرڈینو ڈیجیٹل پنوں کو ختم کردے گی کیونکہ انہیں صرف 40 ایم اے کی درجہ بندی کی گئی ہے۔ لہذا ہم ایک موٹر ڈرائیور استعمال کرتے ہیں جو Ardino بورڈ سے کم موجودہ PWM (پلس کی چوڑائی ماڈلن) سگنل لے سکے اور لینری ایکچوایٹر کو ایک اعلی موجودہ PWM سگنل کی پیداوار دے سکے۔
موٹر ڈرائیور دو پی ڈبلیو ایم ڈیجیٹل پن (ارڈینو اونو پر 10 اور 11) سے منسلک ہے۔ ان پنوں میں سے ایک LOW اور دوسرا HIGH ترتیب دے کر (نیچے کوڈ میں لائن 18 اور 19 دیکھیں) ہم زیادہ سے زیادہ رفتار سے مشق کرنے والے کو بڑھا سکتے ہیں۔ ایکچوایٹر کو روکنے کے ل we ہم نے دونوں پنوں کو نیچے کی طرف رکھ دیا (نیچے کوڈ میں لائن 21 اور 22 دیکھیں) اور حرکت کی سمت کو پلٹنے کے ل we ہم ہائی اور لو پنوں کی ترتیب کو پلٹ سکتے ہیں (نیچے کوڈ میں لائن 24 اور 25 دیکھیں)۔ ہم متغیر "اسپیڈ" کو رینج میں موجود کسی بھی قدر [0 ، 255] میں تبدیل کرکے بھی رفتار کو ایڈجسٹ کرسکتے ہیں۔ نیچے کوڈ میں لائن 17 دیکھیں۔
کوڈ
https://gist.github.com/Will-Firgelli/c0ef0871dc1946d75257e0c29dccae2a
ایک پوٹینومیٹر کے ساتھ مختلف اسپیڈ کنٹرول
مندرجہ بالا مثال میں ہم دستی طور پر کوڈ کی لائن 17 میں تیز رفتار طے کرتے ہیں۔ تاہم ایسے حالات پیدا ہوسکتے ہیں جہاں ہم وقت کے مطابق مشق کرنے والے کی رفتار کو مختلف کرنا چاہتے ہیں۔ اس کو حاصل کرنے کا سب سے آسان طریقہ ایک پوٹینومیٹر استعمال کرنا ہے۔ A پوٹینومیٹر ہےایک تین ٹرمینل متغیر رزسٹر جو ولٹیج ڈیوائڈر کے طور پر کام کرسکتا ہے۔ پوٹینومیٹر کی نوک کو گھومنے سے آؤٹ پٹ وولٹیج مختلف ہوجائے گا اور ہم اس کو ایک متغیر کی رفتار مقرر کرنے کے لئے ایک اردوینو پر ینالاگ پن سے جوڑ سکتے ہیں۔
وائرنگ

ہارڈ ویئر اور سافٹ ویئر کا جائزہ
جیسا کہ اوپر ذکر کیا گیا ہے ، ایک پوٹینومیٹر ایک روٹری ڈیوائس ہے جو گنب گھومنے پر مزاحمت کو تبدیل کرتا ہے۔ پوٹینومیٹر کے دو بیرونی پنوں کو 5V اور GND اور درمیانی پن کو اردوینو ینالاگ پن ، A0 سے مربوط کرنے سے ، ایک ولٹیج ڈویائڈر بنایا گیا ہے۔ جیسے ہی یہ نقاب گھمایا جاتا ہے ، اردوینو [0 ، 1023] سے لے کر ینالاگ ریڈنگ پڑھے گا۔
رینج [512، 1023] میں اقدار کے ل we ہم چاہتے ہیں کہ مشق کرنے والے کو بڑھایا جائے اور اقدار [0 ، 511] کے ل we ہم چاہتے ہیں کہ ایکچوایٹر پیچھے ہٹ جائے ، یہ لائن 22 اور 28 میں ایک عام سادہ () / / بیان کے ساتھ حاصل کیا جاسکتا ہے۔ نیچے کوڈ پھر نقشہ () فنکشن (نیچے کوڈ میں لائن 23 اور 29) کا استعمال کرتے ہوئے ہم اس کو پی ڈبلیو ایم سگنل میں تبدیل کرسکتے ہیں جو ایکچواٹر کی رفتار اور سمت دونوں پر قابو پائے گا۔
کوڈ
https://gist.github.com/Will-Firgelli/d2cdf69edc829974885984b3fb8e4856



