لکیری ایکچوایٹر سپیڈ کنٹرول

لکیری ایکچیوٹرز مختلف شعبوں کے اندر آپریشنز میں اہم کردار ادا کرتے ہیں، بشمول صحت کی دیکھ بھال، مینوفیکچرنگ، زراعت، آٹوموٹو اور دیگر؛ لہذا زیادہ درستگی اور درستگی کی ضرورت ضروری ہے۔ لکیری ایکچیویٹر اسپیڈ کنٹرولرز درخواست کی ضروریات کے مطابق مطلوبہ رفتار پر حرکت کو کنٹرول کرنے کے لیے بہترین کنٹرول میکانزم پیش کرتے ہیں۔
لکیری ایکچیویٹر اسپیڈ کنٹرولرز کے اہم کام الیکٹرک موٹر یا ایکچیویٹر کو فراہم کردہ وولٹیج ان پٹ کو ریگولیٹ کرنا ہے جبکہ اب بھی زیادہ سے زیادہ قوت پیداواری صلاحیت پر بوجھ کی ضروریات کو پورا کرنا ہے - اس طرح متحرک نظاموں میں زیادہ کارکردگی کو یقینی بنانا ہے۔
لکیری ایکچیویٹر کی رفتار کو کنٹرول کرنے کے لیے نفیس میکانزم کی ضرورت ہوتی ہے جیسے کہ velocity کنٹرول لوپ کو لاگو کرنا جس میں ایمبیڈڈ سینسر سے حاصل کردہ فیڈ بیک لوپس شامل ہوتے ہیں جو پوزیشن یا رفتار میں تبدیلیوں کا پتہ لگاتے ہیں - یہ انشانکن کے ذریعے بہترین نتائج پیدا کرنے میں مدد کرتا ہے۔ FIRGELLIکے ایکچو ایٹر کنٹرول بورڈ کا اپنا بلٹ ان سپیڈ کنٹرول فیڈ بیک لوپ ہے جو آپ کے سسٹم کی ترقی کے لیے درست حرکت کو یقینی بناتے ہوئے آپریشن کے لیے بہترین حالات قائم کرتا ہے۔

FIRGELLIاگر آپ کو رفتار کو درست طریقے سے کنٹرول کرنے کے لیے فیڈ بیک کلوز لوپ سسٹم کی ضرورت ہو تو کے ایکچویٹر کنٹرول بورڈ کا اپنا بلٹ ان سپیڈ کنٹرول فیڈ بیک لوپ ہے۔ اس کنٹرول باکس کو Linear Actuators کے ساتھ استعمال کیا جا سکتا ہے جو فیڈ بیک سینسر میں بنائے گئے ہیں، جیسے کہ ہال سینسر یا آپٹیکل سینسر، کیونکہ اسے ایکیویٹر کی رفتار کی پیمائش کے لیے ان سینسر کی ضرورت ہوتی ہے۔
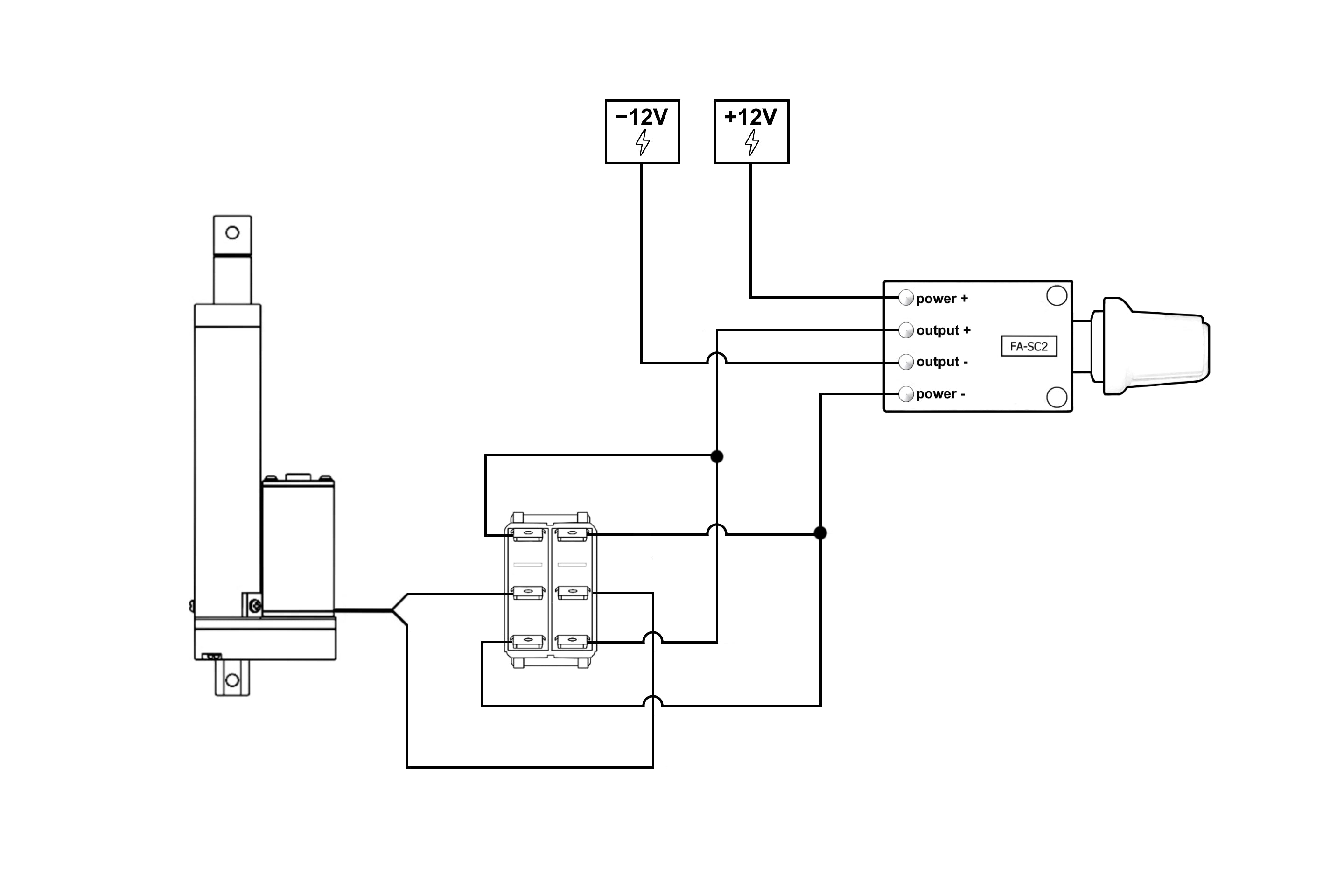
درستگی کو یقینی بنانے اور غلطیوں سے بچنے کے لیے، اسپیڈ کنٹرولرز کے زیرانتظام لکیری ایکچیوٹرز اپنی رفتار کی مسلسل نگرانی اور دوبارہ جائزہ لیتے ہیں۔ مندرجہ ذیل وائرنگ ڈایاگرام واضح کرتا ہے کہ بہترین کارکردگی اور کنٹرول کے لیے لکیری ایکچیویٹر کو راکر سوئچ اور اسپیڈ کنٹرولر سے کیسے جوڑنا ہے۔
اسپیڈ کنٹرولر اور ایکچیویٹر کے لیے وائرنگ ڈایاگرام
فیڈ فارورڈ کنٹرول
لکیری ایکچیوٹرز اور اسپیڈ کنٹرول کے تناظر میں، فیڈ فارورڈ کنٹرول ایک اہم تصور ہے۔ یہ نقطہ نظر اس مفروضے کے تحت کام کرتا ہے کہ بطور کنٹرولر، صارف اسپیڈ کنٹرولر کے آؤٹ پٹ کا درست اندازہ لگا سکتا ہے اور اس کے مطابق کوئی بھی ضروری ایڈجسٹمنٹ کر سکتا ہے۔ اسپیڈ ریگولیشن کے لیے کنٹرول لوپ کا بنیادی مقصد ایکچیویٹر کی رفتار کو کسی خاص کام کی ضروریات کے مطابق کرنے کے لیے بہتر بنانا ہے۔ بشرطیکہ تمام متغیرات مستقل رہیں، فیڈ فارورڈ کنٹرول صارفین کو ایکچیویٹر کے ڈیوٹی سائیکل اور اس کی رفتار کے درمیان تعلق کے بارے میں باخبر پیشین گوئیاں کرنے کے قابل بناتا ہے، سینسر کی قدروں فی سیکنڈ کی بنیاد پر۔
ڈیوٹی سائیکل کا حساب لگا کر، صارفین تخمینہ میں غلطیوں کو کم کرتے ہوئے مطلوبہ رفتار کو درست طریقے سے حاصل کر سکتے ہیں۔ یہ نقطہ نظر ہدف کو اوور شوٹنگ اور مکمل طور پر کھو جانے، یا ہدف تک پہنچنے سے پہلے وقت سے پہلے رکنے کے خطرے کو کم کرتا ہے، اس طرح لکیری ایکچیویٹر کے استعمال کے بنیادی مقصد کو نقصان پہنچاتا ہے۔
ڈی سی اسپیڈ کنٹرولر ایکچیویٹر کی رفتار کو کیسے کنٹرول کرتا ہے۔
ایک DC اسپیڈ کنٹرولر جو پلس وِڈتھ ماڈیولیشن (PWM) کا استعمال کرتا ہے ایک جدید ترین الیکٹرانک ڈیوائس ہے جو کہ رفتار کو کنٹرول کرنے کے لیے ڈیزائن کیا گیا ہے۔ ڈی سی ایکچیویٹر. PWM ایک ایسی تکنیک ہے جو ایک مستقل فریکوئنسی پر بجلی کو تیزی سے آن اور آف کر کے DC موٹر کو فراہم کردہ اوسط وولٹیج کو کنٹرول کرنے کے قابل بناتی ہے۔ DC ایکچیویٹر کی رفتار کو ہر سائیکل کے اندر آف ٹائم کے نسبت آن ٹائم (ڈیوٹی سائیکل) کو ایڈجسٹ کر کے ماڈیول کیا جا سکتا ہے۔
یہاں ایک جائزہ ہے کہ پی ڈبلیو ایم کا استعمال کرتے ہوئے ڈی سی اسپیڈ کنٹرولر ڈی سی ایکچوایٹر کی رفتار کو کنٹرول کرنے کے لیے کیسے کام کرتا ہے۔
- تعدد: PWM کنٹرولر ایک مستقل فریکوئنسی مربع لہر سگنل تیار کرتا ہے، جو باری باری آن اور آف ادوار پر مشتمل ہوتا ہے۔ یہ تعدد عام طور پر اتنی زیادہ ہوتی ہے کہ ایکچیویٹر کی موٹر سوئچنگ ایکشن کو نہیں سمجھتی، جس کے نتیجے میں ہموار رفتار کنٹرول ہوتی ہے۔
- ڈیوٹی سائیکل:دی ڈیوٹی سائیکل اس سے مراد اس وقت کا فیصد ہے جو ایک سائیکل کے دوران سگنل آن حالت میں رہتا ہے۔ ڈیوٹی سائیکل کو مختلف کرکے، ایکچیویٹر کی موٹر کو فراہم کردہ اوسط وولٹیج کو کنٹرول کیا جا سکتا ہے۔ ایک اعلیٰ ڈیوٹی سائیکل ایک اعلی اوسط وولٹیج کے مساوی ہے، جس کی وجہ سے ایکچیویٹر کی رفتار تیز ہوتی ہے، جب کہ کم ڈیوٹی سائیکل کے نتیجے میں اوسط وولٹیج کم ہوتی ہے اور اس کے نتیجے میں، ایکچیویٹر کی رفتار کم ہوتی ہے۔
- ماڈیولیشن: جیسا کہ صارف یا ایک خودکار نظام DC ایکچیویٹر کی مطلوبہ رفتار کو ایڈجسٹ کرتا ہے، PWM کنٹرولر اس کے مطابق ڈیوٹی سائیکل میں ترمیم کرتا ہے۔ یہ اس بات کو یقینی بناتا ہے کہ ایکچیویٹر کو مناسب اوسط وولٹیج فراہم کیا جاتا ہے، جس سے اس کی رفتار پر قطعی کنٹرول ہوتا ہے۔
- کارکردگی: چونکہ PWM سپیڈ کنٹرولر تیزی سے مکمل طور پر آن اور مکمل طور پر آف حالتوں کے درمیان سوئچ کرتا ہے، اس لیے حرارت کی صورت میں توانائی کے نقصانات کو کم کیا جاتا ہے۔ یہ PWM کو DC ایکچوایٹر کی رفتار کو کنٹرول کرنے کا ایک انتہائی موثر طریقہ بناتا ہے۔
خلاصہ طور پر، ایک DC اسپیڈ کنٹرولر جو PWM کو ملازمت دیتا ہے ایک مستقل فریکوئنسی اور مختلف ڈیوٹی سائیکل کے ساتھ مربع لہر سگنل پیدا کرکے کام کرتا ہے۔ ڈیوٹی سائیکل کو ایڈجسٹ کر کے، کنٹرولر ڈی سی ایکچویٹر کی موٹر کو فراہم کردہ اوسط وولٹیج کو ماڈیول کرتا ہے، جس سے توانائی کی اعلی کارکردگی کو برقرار رکھتے ہوئے اس کی رفتار پر درست کنٹرول حاصل ہوتا ہے۔
آپ سپیڈ کنٹرولر کیوں استعمال کرنا چاہیں گے؟
-
صحت سے متعلق کنٹرول: سپیڈ کنٹرولر کا بنیادی فائدہ یہ ہے کہ وہ ایکچیویٹر کی رفتار پر قطعی کنٹرول فراہم کر سکتا ہے۔ یہ خصوصیت لوگوں کو ایکچیویٹر کی رفتار کو ٹھیک کرنے کے قابل بناتی ہے، اس بات کو یقینی بناتے ہوئے کہ یہ مخصوص کام یا درخواست کے لیے بہترین طریقے سے کام کرتا ہے۔ درستگی کے ساتھ مطلوبہ رفتار حاصل کر کے، آپ سسٹم کی مجموعی کارکردگی اور تاثیر کو بڑھا سکتے ہیں۔
-
موافقت: مختلف ایپلی کیشنز اکثر رفتار کے مختلف تقاضوں کا مطالبہ کرتی ہیں یا آپریشن کے دوران ایڈجسٹمنٹ کی ضرورت ہوتی ہیں۔ دی FIRGELLI اسپیڈ کنٹرولر آپ کو ہر ایپلی کیشن کے منفرد تقاضوں کو پورا کرنے کے لیے ایکچیویٹر کی رفتار میں آسانی سے ترمیم اور موافقت کرنے کی لچک فراہم کرتا ہے۔ یہ موافقت انجینئرز کو متنوع منظرناموں میں سسٹم کی کارکردگی کو بہتر بنانے کا اختیار دیتی ہے۔
-
ہموار آپریشن: سپیڈ کنٹرولرز، خاص طور پر وہ لوگ جو پلس وِڈتھ ماڈیولیشن (PWM) ٹکنالوجی کا استعمال کرتے ہیں جو زیادہ تر مناسب رفتار کنٹرولرز کرتے ہیں، ایکچیویٹر کی رفتار پر ہموار اور مستقل کنٹرول فراہم کرنے کا فائدہ پیش کرتے ہیں۔ یہ ہموار آپریشن بہت اہم ہے کیونکہ یہ ایکچیویٹر پر میکانکی دباؤ اور پہننے کو کم کرتا ہے، اس طرح اس کی سروس لائف کو بڑھاتا ہے۔
-
ہم وقت سازی: کچھ ایپلیکیشنز کو متعدد ایکچیوٹرز کے درمیان مطابقت پذیر حرکت کی ضرورت ہوتی ہے۔ اس طرح کے معاملات میں، اسپیڈ کنٹرولرز شامل تمام ایکچیوٹرز میں مسلسل رفتار کو برقرار رکھنے میں اہم کردار ادا کرتے ہیں۔ یہ ہم آہنگی قطعی ہم آہنگی اور ہم آہنگی کو یقینی بناتی ہے، جس کے نتیجے میں مجموعی طور پر نظام کی بہتر کارکردگی اور فعالیت ہوتی ہے۔
اسپیڈ کنٹرولر سے آنے والی ہائی پچ آواز کیا ہے جب آپ رفتار کو کم سے کم کرتے ہیں؟
تیز رفتار آواز جو آپ سپیڈ کنٹرولر کی طرف سے سنتے ہیں جب آپ رفتار کو کم اور کم کرتے ہیں عام طور پر پلس وِڈتھ ماڈیولیشن (PWM) تکنیک کی سوئچنگ فریکوئنسی کی وجہ سے ہوتی ہے جو ایکچیویٹر کی رفتار کو کنٹرول کرنے کے لیے استعمال ہوتی ہے۔
PWM میں موٹر کو بجلی کی سپلائی کو ایک مستقل فریکوئنسی پر تیزی سے آن اور آف کرنا شامل ہے۔ جب رفتار کم ہو جاتی ہے، ڈیوٹی سائیکل (سگنل کے آن حالت میں ہونے کا فیصد) کم ہو جاتا ہے، جس کی وجہ سے موٹر کم اوسط وولٹیج حاصل کرتی ہے۔ بعض صورتوں میں، PWM فریکوئنسی یا اس کی ہارمونکس انسانی سماعت کی قابل سماعت رینج (20 Hz سے 20 kHz) کے اندر آ سکتی ہے۔
رفتار کنٹرولر کے اندر موجود موٹر کوائلز یا دیگر اجزاء کے کمپن کی وجہ سے آواز پیدا ہو سکتی ہے، جو PWM فریکوئنسی یا اس کے ہارمونکس پر گونجتے ہیں۔ یہ کمپن موٹر کنڈلیوں میں برقی رو سے پیدا ہونے والے مقناطیسی میدان کے تیزی سے پھیلنے اور سکڑنے کی وجہ سے ہوتی ہے جب وہ آن اور آف حالتوں کے درمیان سوئچ کرتے ہیں۔
جیسے جیسے رفتار کم ہو جاتی ہے، ڈیوٹی سائیکل کم ہو جاتا ہے، اور موٹر کو ہر سوئچنگ سائیکل کے دوران کم طاقت ملتی ہے۔ طاقت میں یہ تبدیلی قابل سماعت شور کو زیادہ واضح کرنے کا سبب بن سکتی ہے۔ مزید برآں، موٹر اور سپیڈ کنٹرولر کی مکینیکل اور برقی خصوصیات کے لحاظ سے سسٹم کی بعض گونجنے والی فریکوئنسییں قابل سماعت شور پیدا کرنے کے لیے زیادہ حساس ہو سکتی ہیں۔




