



Bộ truyền động tuyến tính phản hồi










Bộ truyền động tuyến tính phản hồi
- Sự miêu tả
- Thông số kỹ thuật
- Bản vẽ kỹ thuật
- Bảng điều khiển
- Biểu đồ hiệu suất
- Video sản phẩm
- Video so sánh
- Tải xuống mô hình 3D (.step)
- Sơ đồ nối dây
- Hướng dẫn
- Tải xuống
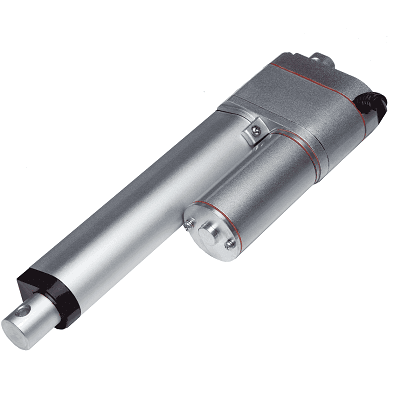
Sự miêu tả
Các bộ truyền động này được trang bị các chiết áp bourns tích hợp để bạn có thể xác định vị trí tuyệt đối của thanh truyền động bất cứ lúc nào.
Để kết nối các bộ truyền động phản hồi với thiết bị đọc phản hồi, chúng tôi khuyên bạn nên sử dụng bảng Arduino. Bấm vào đây Để biết thêm thông tin về cách sử dụng bảng Arduino với các bộ truyền động của chúng tôi.
Phản hồi chiết áp chạy trên hệ thống 3 dây ohm 10k. Động cơ bộ truyền động tuyến tính được điều khiển bởi một hệ thống hai dây trong đó đảo ngược độ phân cực sẽ rút lại bộ truyền động; Hệ thống này dễ dàng có dây vào các bảng mạch để điều khiển thông minh, cũng như rơle, công tắc, v.v. Dòng bộ truyền động thanh phản hồi sử dụng Giá đỡ gắn MB1 và/hoặc Khung MB6. Các Khung thanh MB10 cũng sẽ phù hợp với đơn vị này.
Các mô hình CAD của bộ truyền động này có thể được tìm thấy dưới Tài nguyên/Tệp 3D. Để biết thêm thông tin xem xét các thông số kỹ thuật và bản vẽ kỹ thuật dưới đây hoặc truy cập Trang hướng dẫn Để được hướng dẫn về cách sử dụng bộ truyền động này với các công tắc, điều khiển từ xa, bộ điều khiển tốc độ và Arduino.
Các tính năng và lợi ích tiêu chuẩn
- Được trang bị các chiết áp 10 vòng tích hợp với điện trở 10k ohm
- Được trang bị công tắc giới hạn tích hợp
- Đã cố định các giới hạn cuối cùng được tích hợp (không thể chuyển động). Để điều chỉnh các bộ truyền động tuyến tính chuyển đổi giới hạn có thể điều chỉnh, hãy thử Bộ truyền động chuyển đổi giới hạn có thể điều chỉnh
- Có sẵn trong 3 lực động. 35 lbs., 150 lbs. và 200 lbs.
- Vật liệu cao cấp: Nhôm trong và ống ngoài kết hợp với vỏ hợp kim kẽm để tăng cường chống ăn mòn, dẫn đến tuổi thọ dài
- Điểm gắn kết của Clevis ở mỗi đầu để đảm bảo đồ đạc dễ dàng
- Tương thích với Giá đỡ gắn MB1 và/hoặc Khung MB6 Và với Khung kết thúc thanh MB10
- Tích hợp với thiết bị đọc phản hồi như bảng Arduino để xác định giới hạn vị trí đặt trước.
Thông số kỹ thuật
Người mẫu FA-PO-35-12-XX FA-PO-150-12-XX FA-PO-240-12-XX Lực động 35 lbs. 150 lbs. 200 lbs. Lực tĩnh 70 lbs. 300 lbs. 400 lbs. Tốc độ ("/s) 2 0.5 0.3 Tỷ lệ bánh răng 5:1 20:1 30:1 Chu kỳ nhiệm vụ 20% Xếp hạng IP 54 Vít Vít Acme Đường kính chủ đề 12 mm Clevis kết thúc Đường kính 6,3mm Đầu vào 12V DC Max Draw 5 a Nhiệt độ hoạt động 0 ° C - 40 ° C. Công tắc giới hạn Tích hợp (đặt trước nhà máy) - Để điều chỉnh các bộ truyền động tuyến tính chuyển đổi giới hạn có thể điều chỉnh, hãy thử Bộ truyền động chuyển đổi giới hạn có thể điều chỉnh Chứng nhận an toàn CE, Rohs (Các) dấu ngoặc MB1 và/hoặc MB6; MB10 Nhận xét 10K ohm 3 dây tuyến tính tuyến tính +/- 0,25% 10 quay vòng quay; Xếp hạng năng lượng 1-1,5W Khả năng đồng bộ Có, với một vi điều khiển. Không tương thích với FCBS của chúng tôi Chiều dài dây 23" Kích thước dây 18awg Đột quỵ Độ dài rút lại Chiều dài mở rộng Cân nặng Bước tập tin 2" 7.9" 9.9" 2,7 lbs Fa-po- (f) -12-2 3" 8.9" 11.9" 2,8 lbs FA-PO- (F) -12-3 4" 9.9" 13.9" 2,9 lbs FA-PO- (F) -12-4 6" 11.9" 17.9" 3.1 lbs Fa-po- (f) -12-6 8" 13.9" 21.9" 3,4 lbs FA-PO- (F) -12-8 12" 17.9" 29.9" 3,85 lbs FA-PO- (F) -12-12 Bản vẽ kỹ thuật
 ×
×Bảng điều khiển
Tất cả các bộ truyền động phản hồi đều tương thích với bảng điều khiển bộ truyền động tuyến tính Actuonix, còn được gọi là bảng LAC. Thêm thông tin có thể được tìm thấy bằng cách theo dõi Liên kết này. cũng như mộtHội đồng Arduino.


Biểu đồ hiệu suất


Video sản phẩm
Đánh giá bộ truyền động tuyến tính phản hồi

Video so sánh
Phản hồi so với bộ truyền động tuyến tính cổ điển

Tải xuống mô hình 3D (.step)
Lực lượng 35lb, 150lb và 200lb
Sơ đồ nối dây
Nhấn vào đây để xem trình tạo sơ đồ dây của chúng tôi để giúp bạn thiết lập hệ thống bộ truyền động của mình
Hướng dẫn
Nhấn vào đây để xem hướng dẫn của chúng tôi về cách thiết lập Arduino với các bộ truyền động phản hồi của chúng tôi.
Tải xuống
Compatible Brackets



Frequently Bought Together

- MB1 Bracket$7.60 USD
- MB6 Body Bracket$9.75 USD
- MB10 Bracket for Rod end actuators$17.85 USD
- Momentary Toggle Switch for Actuators$12.00 USD
