Potentiometers
Potentiometers, die variabele weerstanden zijn, worden gebruikt in lineaire actuatoren om positionele feedbackbasis te geven over hoe hun weerstand verandert. Lineaire actuatoren die potentiometers gebruiken voor feedback, zoals onze Feedback Rod Linear Actuator, zal bestaan uit de 3 extra draden zoals hieronder weergegeven, draad 1 voor de ingangsspanning, draad 2 is de variabel Weerstand en draad 3 is voor grond. U kunt de uitvoer van de potentiometers lezen door de spanning tussen draad 2, de uitgang en de grond te meten, die een indicatie zal geven van de absolute positie van de lineaire actuator. Om deze feedback te gebruiken, moet u gebruik maken van een soort microcontroller, zoals een Arduino, om deze positionele waarde te lezen terwijl de actuator beweegt.

Positionele feedback van een potentiometer
Terwijl de variabele weerstand van de potentiometer verandert naarmate de lineaire actuator beweegt, zal het spanningsverschil tussen draad 2 en grond veranderen. Daarom kan de feedback eenvoudig worden behandeld in de software van een controller, zoals een Arduino, omdat u eenvoudig de uitgangsspanning van draad 2 kunt vergelijken met grond. Met behulp van een Arduino kan dit eenvoudig worden gedaan door een analoog in pin van een microcontroller te gebruiken en de functie Analogread () te gebruiken om de spanning uit draad te lezen 2. Een voorbeeld van hoe een Arduino kan worden aangesloten op een lineaire actuator met potentiometer feedback wordt getoond onderstaand.

Het analoog in pennen van de Arduino zijn analoog-naar-digitale converters (ADC), die de analoge spanning op draad 2 omzetten in een 10-bit ADC-waarde die tussen 0 tot 1023 zal liggen. Een 10-bits ADC-waarde betekent 2^10 of 1024 verschillende waarden variërend van 0 tot 1023. Niet alle microcontrollers zijn 10-bits ADC, sommige zijn 8-bit of 16-bit, en hoe groter het aantal bits hoe groter de resolutie van de ADC. Nadat u het analoge signaal hebt omgezet in een digitale waarde, moet u het exacte analoge bereik van uw specifieke lineaire actuator vinden, omdat het mogelijk niet varieert van 0 tot inch. 1023. Dit komt door de versnellingsbak in de actuator waardoor de potentiometer volledig tot zijn limiet draait en betekent dat u dit bereik handmatig moet bepalen. Voor het coderingsvoorbeeld hieronder, de 4 "slaglengte feedback staaf lineaire actuator had een analoge waarde van 44 bij 0 ”en een analoge waarde van 951 bij 4”. Met behulp van deze waarden kunt u verhoudingen gebruiken om de waarde van de slaglengte te bepalen zoals hieronder:

Dit kan worden vereenvoudigd in een slaglengte = 0,00441*(analoge waarde - 44), zoals in het onderstaande coderingsvoorbeeld. Hoe vaak u deze analoge waarde leest in de code van uw microcontroller is een andere belangrijke overweging. In het onderstaande codevoorbeeld leest de Arduino de potentiometer en werkt de positiewaarde bij, zolang de actuator beweegt. Maar u kunt ook gebruik maken van interne timers om de positiewaarde over een ingesteld interval van tijd bij te werken of u kunt eenvoudig de Potentiometer -leesfunctie in de hoofdlus van de code plaatsen en de positiewaarde continu bijwerken. Hoewel dit laatste niet wordt aanbevolen als u van plan bent om uw controller te gebruiken om meerdere individuele functies uit te voeren.
https://gist.github.com/OMikeGray/4dec9e075a8fe41efaea001fa1e98d70
float pos; // Actuator Position
float conNum = 0.00441; // Constant to convert ADC to Inches
// Equal to (951 (ADC at 4") - 44 (ADC at 0")/4")^-1
void setup() {
pinMode(A1, INPUT); // Configure Analog In pin 1 as an Input
pinMode(10, OUTPUT); // Configure pin 10 as an Output
pinMode(11, OUTPUT); // Configure pin 11 as an Output
pinMode(2, INPUT_PULLUP); // Input for Button
pinMode(3, INPUT_PULLUP); // Input for Button
Serial.begin(9600);
}
void loop() {
if(digitalRead(2) == HIGH & digitalRead(3) == LOW){
// Retract Actuator
analogWrite(10, 0);
analogWrite(11, 255);
pos = readPotentiometer(); // Print position value to the Serial Display
Serial.println(pos);
delay(1);
}
else if(digitalRead(2) == LOW & digitalRead(3) == HIGH){
// Extend Actuator
analogWrite(10, 255);
analogWrite(11, 0);
pos = readPotentiometer();
Serial.println(pos); // Print position value to the Serial Display
delay(1);
}
else{
// Stop Actuator
analogWrite(10, 0);
analogWrite(11, 0);
}
}
/*Function to Read Potentiometer and Convert it to Inches*/
float readPotentiometer(void){
float pos;
pos = conNum*(analogRead(A1) - 44); // 44 ADC is equal to 0"
return pos;
}Omgaan met elektrische ruis
Een nadeel van feedback van de potentiometer is dat deze kan worden beïnvloed door elektrische ruis en uw positionele waarde onstabiel kan maken. Een manier om dit te overwinnen is om een digitaal filter te gebruiken om de elektrische ruis te verwijderen en stabiele resultaten te bereiken. Er zijn maar weinig verschillende soorten filters die kunnen worden gebruikt van exponentiële filters tot high-pass en band-pass filters elk met hun eigen voordelen, maar voor veel toepassingen met lineaire actuatoren zal het eenvoudigweg een lopende gemiddelde van de positionele waarde gebruiken. Een lopende gemiddelde is gewoon het gemiddelde van de laatste X -hoeveelheid metingen om het ingangssignaal af te gladderen. Het exacte aantal metingen dat u gemiddeld wilt, hangt af van uw toepassing en u moet mogelijk met dit nummer spelen om te bepalen wat het beste werkt. Een paar dingen om op de hoogte te zijn, als u te weinig metingen in uw gemiddelde hebt, zal uw signaal nog steeds luidruchtig zijn, maar als u te veel metingen hebt, blijven uw resultaten te ver achter bij de werkelijke positie van de actuator om bruikbaar te zijn. Het vindt een evenwicht tussen te weinig en te veel metingen die uw filter effectief maken. Hieronder is een plot die het effect van een lopende gemiddelde filter toont versus het werkelijke ingangssignaal.
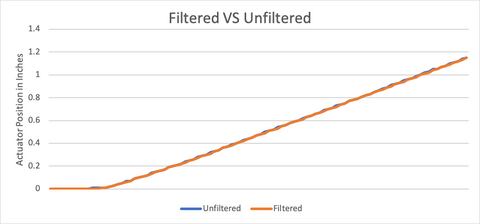
De code die wordt gebruikt om het lopende gemiddelde te implementeren, wordt hieronder weergegeven, het gebruikt gemiddeld 3 metingen om het ingangssignaal te gladstrijken. Drie metingen werden gekozen omdat er niet veel ruis was in het werkelijke ingangssignaal, dus slechts enkele metingen waren nodig om de waarde te gladstrijken. Als er meer ruis in het ingangssignaal was, zou een groter aantal metingen nodig zijn. In situaties waarin veel inductieve componenten (d.w.z. motoren) elektrische ruis zijn, zal een veel groter probleem zijn.
https://gist.github.com/OMikeGray/b13f156c080a100a89e5bbd541d0565e
float readPotentiometer(void){
int sum = 0; // Sum of Measurements
static int j = 0;
valuesToAverage[j] = analogRead(A1); // Place Measurement in Buffer with Previous Values
for(int i = 0; i < numMeasure; i++){
sum +=valuesToAverage[i]; // Add Up all Muasurements
}
if(j < numMeasure-1){j++;}
else{j = 0;}
return conNum*((sum/numMeasure) - 44); // Divide by number of measurements
} // & Convert to InchesGebruikmakend van feedback voor automatisering
Het mooie van het implementeren van feedback in uw ontwerp is dat u hiermee een zelfautomatiseerd systeem kunt maken dat weet waar u moet zijn voor een bepaalde invoer. Om feedback van potentiometer in een geautomatiseerd systeem te gebruiken, kunt u eenvoudig uw wens langere lengte van uw lineaire actuator vergelijken met de werkelijke positie die door de potentiometer wordt gegeven. Vervolgens moet u gewoon uw actuator vertellen om dienovereenkomstig uit te breiden of terug te trekken. Hoewel het gebruik van feedback van potentiometer in een geautomatiseerd systeem een paar problemen heeft die u mogelijk moet overwinnen. De ene is de kwestie van elektrische ruis, die hierboven is besproken, de andere is in staat om herhaalbare resultaten te bereiken. Omdat potentiometers over het algemeen niet zo gevoelig zijn voor kleinere bewegingen van de lineaire actuator, vergeleken met de andere feedbackopties, maakt dit het bereiken van precieze herhaalbare resultaten moeilijker. In de praktijk betekent dit dat u een foutenmarge hebt rond de gewenste positie, die mogelijk acceptabel is voor uw gegeven toepassing. Als u geen zeer precieze positionarissen nodig hebt of een handmatige schakelaar vervangt door een microcontroller om uw systeem te automatiseren, is positionele feedback van een potentiometer voor u nauwkeurig genoeg. Als u een nauwkeurige positionering van uw lineaire actuator nodig hebt, moet u mogelijk overwegen Andere feedbackopties voor uw lineaire actuator of voegt u extra componenten toe om betrouwbaardere resultaten te bieden. Deze componenten omvatten sensoren of Externe limietschakelaars die u een betere indicator van absolute positie kan geven.

Niet in staat zijn om herhaalbare resultaten te bereiken is ook een probleem bij het controleren van meerdere lineaire actuatoren. Omdat het uitgangssignaal van de potentiometer eenvoudig wordt beïnvloed door elektrische ruis, inclusief elektrische ruis van de andere actuatoren, en afhankelijk is van de ingangsspanning naar de potentiometer, kan ervoor zorgen dat meerdere lineaire actuatoren tegelijkertijd een uitdaging kunnen zijn. Het gebruik van digitale filters, het garanderen van stabiele ingangsspanning naar de potentiometer en het hebben van de uitgangssignaaldraden die weglopen van andere inductieve componenten zullen allemaal helpen om meer herhaalbare resultaten te garanderen. Hoewel, als u meerdere actuatoren tegelijkertijd wilt uitvoeren, is het misschien beter om de Andere feedbackopties voor lineaire actuatoren.



