Een Stanford University -project in de voorjaarsbegeleide actuators

Wetenschappers van Stanford University hebben een innovatieve aanpak ontwikkeld om elektrische motoren te verbeteren, waardoor hun vermogen om dynamische acties uit te voeren aanzienlijk te verbeteren. Door een nieuwe actuator te introduceren, een mechanisme dat energie omzet in beweging, hebben ze deze verbetering bereikt. Hun actuator beschreven in Science Robotics, bevat veren en koppelingen, waardoor het een breed scala aan functies kan uitvoeren, terwijl het aanzienlijk minder energie consumeert dan standaard elektrische motoren.
Het ontluikende veld van robotica schetst een beeld van de toekomst die gelijke delen ontzag en nut zijn. De kern van deze futuristische visie is het concept van actuatoren - de spieren achter de bewegingen van een machine. Ze zijn de brug tussen elektronische en mechanische werelden en veranderen elektrische energie in de kinetische kracht die de meest ingewikkelde taken van een robot voedt.
Betreed Stanford University, die een revolutie teweeg heeft gebracht in de actuatorscene door een springondersteund Marvel te introduceren dat klaar is om de efficiëntie en behendigheid van de volgende generatie robots opnieuw te definiëren. De doorbraak heeft verstrekkende implicaties voor bijna elke industrie die is begonnen met het integreren van robotica-technologie, het beloven van verbeterde precisie, energiebesparing en een sprong vooruit in robotachtigheid.
Inzicht in de spring-geassisteerde actuator
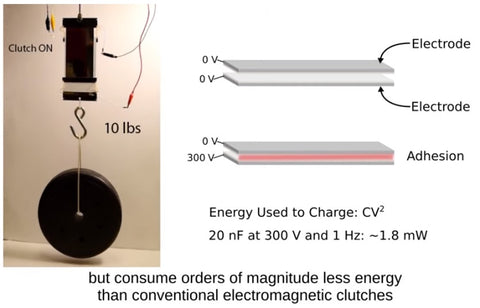
In de kern werkt de nieuw ontworpen actuator op een fundamenteel principe - het opslaan van energie die moet worden vrijgegeven wanneer dat nodig is, net als een gecomprimeerde veer terugslag naar zijn oorspronkelijke vorm. Deze aanpak markeert een paradigmaverschuiving van de traditionele elektrische motoren, vaak bekritiseerd vanwege hun energie-inefficiëntie en onvermogen om met gemak dynamische en plotselinge bewegingen aan te kunnen.
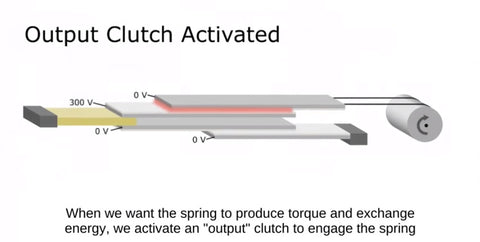
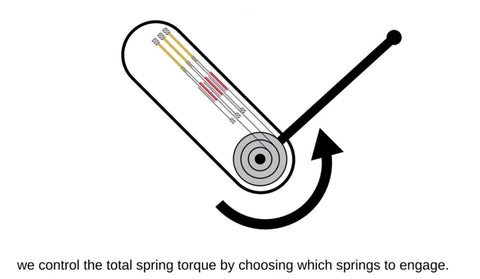
Het onderzoek, gepubliceerd in Science Robotics, schetst een ontwerp dat ingenieus Springs en Cleutes meldt om een veelzijdige actuator te creëren. Met deze hybride benadering kan de actuator het soort geavanceerde bewegingen uitvoeren die we momenteel associëren met elektrische motoren, terwijl we een fractie van de energie gebruiken. Dit is een game-wisselaar voor niet alleen de energie-efficiëntie van robots, maar ook hun ontwerp en mechanica.

Toepassingen en implicaties
De toepassingen van deze voorjaarsactuator zijn net zo divers als ze enorm zijn. Overweeg een assemblagelijnproces waarbij robots herhaaldelijk objecten moeten optillen en plaatsen met griezelige precisie, of in de agile manoeuvres die nodig zijn voor reddingsmissies in gevaarlijke omgevingen. In elk scenario komt het vermogen van de actuator om dynamische belastingen met precisie en snelheid af te handelen als een zegen, waardoor robots betrouwbaarder worden en de bewerkingen die ze ondersteunen, geavanceerder.
De impact op de industrie kan monumentaal zijn. Door de energievereisten van robotsystemen te verminderen, is er een verleidelijke belofte van verlaagde operationele kosten, die op zijn beurt een meer wijdverspreide acceptatie van robottechnologie zou kunnen bevorderen. Bovendien, op velden waar robots cruciaal zijn, maar het gewicht en de stroombeperkingen niet-onderhandelbaar zijn, zoals ruimte-exploratie, biedt deze actuator de mogelijkheid om machines veel veerkrachtiger en vindingrijker te maken.
Ontwerpinzichten en toekomstperspectieven
De ontwerpprincipes die de spring-geassisteerde actuator onderstrepen bieden een venster op de toekomst van robotica. De focus op energie -efficiëntie is niet slechts een technische prestatie; Het is een verwachting van een tijdperk waarin duurzame technologie op de voorgrond staat. Het ingewikkelde samenspel van veren en klauwen vertegenwoordigt een meer ‘organische’ robotachtige beweging, die de spier- en peesarchitectuur nabootst in de meest fijn afgestemde creaties van de natuur.
Wat de toekomstige evolutie van de actuator betreft, zal het onderzoeksteam van Stanford en de bredere technische gemeenschap waarschijnlijk manieren onderzoeken om deze technologie te integreren in verschillende robotformaten. We kunnen verwachten dat we getuige zijn van een golf van prototypes en casestudy's die het aanpassingsvermogen van de actuator in verschillende machines en use cases benadrukken. Bovendien kunnen we met voortdurende verfijningen in de gebruikte materialen en technologie binnenkort kleinere, maar krachtigere actuatoren zien die de envelop van het robotpotentieel nog verder zullen verleggen.
Voorbereiding op een robotachtige renaissance
De opkomst van de spring-geassisteerde actuator geeft een nieuw hoofdstuk aan op het gebied van robotica, een gebaseerd op praktische en innovatie. Bedrijven, ingenieurs en iedereen met interesse in technologie zijn verstandig om deze ontwikkelingen in de gaten te houden. Het is geen stuk om te zeggen dat we op het punt staan getuige te zijn van een renaissance in hoe we robottechnologie waarnemen en gebruiken.
Op dit moment staat het absoluut noodzakelijk om gesprekken te beginnen rond de maatschappelijke en economische veranderingen die deze technologie zou kunnen inluiden. Naarmate robots vaker en verfijnd worden, zullen nieuwe werkprofielen en vaardigheden ontstaan, en bestaande rollen zullen evolueren. Er zal een toename van kansen zijn in het spectrum, van het ontwerpen en bouwen van deze robots tot het onderhouden en programmeren van deze.
De weg voor ons
De weg die voor ons is voor de lente-geassisteerde actuator-en robotica in het algemeen-is een boordevol potentieel. Het huwelijk tussen vindingrijkheid en bruikbaarheid dat deze nieuwe technologie belichaamt, is een voorbode van de opmerkelijke vooruitgang die we kunnen verwachten. Met elke opzettelijke stap zijn we dichter bij een wereld waar robots naadloos worden geïntegreerd in ons dagelijks leven, met taken die ooit het spul van science fiction waren.
In het grotere schema kan deze kruising van robotica en efficiënte activering gewoon de katalysator zijn voor de innovatie die de weg vrijmaakt voor een verscheidenheid aan doorbraken, van slimme productie tot gezondheidszorg en daarbuiten. De onderzoekers van Stanford hebben niet alleen een betere actuator gebouwd; Ze hebben een reeks gebeurtenissen in gang gezet die ertoe kunnen leiden dat robots de onbetwiste assistenten van het menselijk potentieel worden. Het is een opwindend vooruitzicht, en een dat we op unieke wijze klaar zijn om te getuigen en aan deel te nemen.
De integratie van de spring-geassisteerde actuator is geen kwestie van 'if' maar 'wanneer'. En als dat zo is, zal het een domino -effect van vooruitgang veroorzaken, de grenzen van individuele industrieën overstijgen en het weefsel van ons technologische ecosysteem transcureren. Met dit stuk opmerkelijke engineering verbeteren we niet alleen robots; We maken een toekomst waar robots, gemachtigd door vindingrijkheid, harmonieus werken met de mensheid om een wereld te creëren die efficiënt, innovatief en inspirerend is. De robotachtige renaissance is nabij en de spring-geassisteerde actuator is zijn herald.



