Pulsbreedtemodulatie (PWM)
1. De basisprincipes van pulsbreedtemodulatie (PWM)
Pulsbreedtemodulatie (PWM) is een digitale methode die een analoog signaal simuleert om de stroomtoevoer naar elektronische apparaten te regelen. In wezen schakelt PWM de stroom snel tussen AAN- en UIT-toestanden op een vaste frequentie, waardoor het beheer van het gemiddelde vermogen mogelijk wordt, wat een overvloed aan controlemogelijkheden biedt.2. De wetenschap achter PWM
Wanneer we het uitsplitsen, functioneert PWM vrijwel hetzelfde als een lichtschakelaar. Het concept is geworteld in het snel in- en uitschakelen van een signaal. Met variërende intervallen kan men verschillende niveaus van vermogen manipuleren en emuleren. In het uitgestrekte elektronicalandschap beheert PWM dus efficiënt het gemiddelde vermogen dat een apparaat waarneemt en uiteindelijk ontvangt.3. DC-motoren en PWM: een match made in elektronica
Dankzij de flexibiliteit van PWM kan het een groot aantal DC-motoren besturen:• Geborstelde gelijkstroommotoren: deze motoren zijn eenvoudig en reageren direct op PWM-signalen, waardoor deze worden omgezet in variërende snelheden.
• Borstelloze gelijkstroommotoren (BLDC): BLDC-motoren, iets geavanceerder, vereisen aangepaste PWM-sequenties voor elk van hun spoelen.
Het is echter van cruciaal belang om te begrijpen dat, hoewel de fundamentele principes van PWM universeel toepasbaar zijn, individuele motorontwerpen hun reactie op PWM diepgaand kunnen beïnvloeden.
4. De complexiteit van motorkenmerken: grootte, traagheid en koppel
Elke motor is uniek en PWM-signalen moeten worden verfijnd om tegemoet te komen aan deze nuances:• Grootte en traagheid: Motoren met een grotere fysieke omvang of een hogere traagheid vertonen vaak een vertraagde reactie op abrupte PWM-veranderingen. In dergelijke gevallen moet u mogelijk de PWM-frequentie of -duur aanpassen om een soepele werking te garanderen.
• Koppel: motoren met een hoog koppel kunnen krachtigere of langere PWM-signalen nodig hebben. Het is van cruciaal belang om het PWM-signaal te kalibreren zodat het in lijn ligt met het koppel van een motor om optimale prestaties te garanderen.
Deze aanpassingen zijn essentieel om ervoor te zorgen dat de motor harmonieus reageert op het PWM-signaal, waardoor de weg wordt vrijgemaakt voor efficiënte en betrouwbare werking.
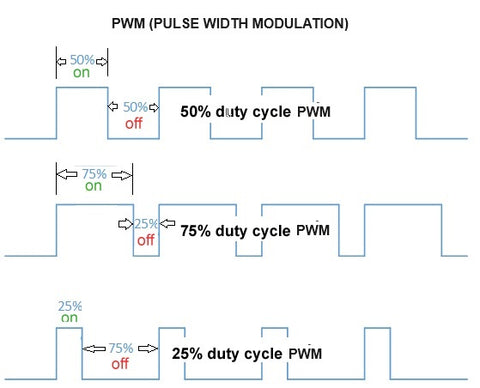
5. Een typisch PWM-signaal ontleden
Een standaard PWM-signaal kan worden gevisualiseerd als een blokgolf, bestaande uit:• Frequentie: Dit bepaalt hoe snel het signaal oscilleert tussen de AAN- en UIT-status. Het wordt gekwantificeerd in Hertz (Hz).
• Aan-tijd: vertegenwoordigt de duur binnen een cyclus waarin het signaal actief of AAN blijft. Door dit aspect te variëren, kan men effectief het vermogen regelen dat naar een motor wordt gestuurd, en dus ook zijn gedrag.
6. De FIRGELLI FCB-1: Een praktijkvoorbeeld van PWM-beheersing
Een tastbare representatie van het potentieel van PWM wordt belichaamd door de FIRGELLI FCB-1:• Snelheidsregeling: De FCB-1 maakt gebruik van de kracht van PWM om de precieze snelheid te dicteren actuatoren. Dit zorgt voor een soepele en efficiënte werking in verschillende toepassingen.
• Synchronisatie: Een van de belangrijkste kenmerken van de FCB-1 is zijn vaardigheid in het synchroniseren van maximaal vier actuatoren. Door nauwgezette PWM-controle zorgt het ervoor dat elke actuator gelijktijdig werkt, waardoor een geharmoniseerde beweging ontstaat.



