Een nieuw automatiseringsproject kan ontmoedigend zijn; wij weten. Met alle technische termen, elektrische bedrading, computerbesturingsinterfaces en de andere toeters en bellen, kan het moeilijk zijn om te weten waar zelfsbegin! Wanneer onzekerheid uw project niet voortschrijdt, kan het teruggaan naar de basis en het herzien van de vereisten van uw project u een route vooruit laten zien. Ik zeg graag dat kennis macht is, maarbegrip is valuta.
Bij het starten van een nieuw automatiseringsproject, of het herstellen en vervangen van een lineaire actuator in een bestaand project, zullen deze vragen u helpen bepalen welke actuator (s) voor uw project werkt.
- Wat is de toepassing?
- Brengt u een actuator in een bestaand ontwerp of product?
- Ontwerp je helemaal opnieuw een nieuw project?
- Wat is de belasting op de eenheid, of, hoeveel kracht heb je nodig?*
- Actuator gewichtsbeoordelingen zijn voor Axiale belastingen alleen. Voor niet-lineaire toepassingen (zoals scharnieren) moet u mogelijk de axiale belasting berekenen.
- Hoeveel slag ('reizen') heb je nodig?
- Vereiste bewegingssnelheid?
- Actuator Bewegingssnelheid en krachtbeoordeling zijn omgekeerd omgekeerd gerelateerd. Mogelijk moet u kiezen tussen de gewenste snelheid of de gewenste kracht, afhankelijk van de toepassing.
- Hoe vaak heeft u het nodig om te werken?
- We berekenen de dienstcycli na 5 minuten van continu gebruik (in beweging); De meeste niet-industriële toepassingen hoeven geen plichtscycli te overwegen.
- Andere condities?
- Functies zoals botsingsbescherming, beperkte snelheden of variabele snelheidsregeling kunnen worden opgenomen met extra componenten.
- Andere functies kunnen soms worden bereikt met relais, besturingsschema's en creatieve bedrading.
Zodra alle bovenstaande criteria zijn begrepen, bent u klaar om uw systeem uit componenten te construeren. Een basisactuatorsysteem vereist deze onderdelen:
- Actuator (s) & Montagebeugels - Beugels zijn actuatorspecifiek. Raadpleeg productpagina's voor de juiste beugels
- Controles (Schakelaar of Op afstand of PLC)
- Het besturingsgedeelte van het systeem is verantwoordelijk voor De polariteit schakelen van het motorcircuit, dat de richting van actuatorbeweging.
- Meest beperkingen, voorwaarden en vereisten Voor een geautomatiseerd systeem zijn betrokken bij het besturingsschema.
- Interfacing met externe systemen kan worden gedaan met besturingscomponenten op verschillende niveaus van complicaties.
- Krachtbron - (overtreffen de cumulatieve stroomstroomtrekking van uw actuatoren)
- Het eenvoudigst mogelijk systeem is het CSPS Wired Power & Control System, plus een Actuator (met een 5A -trekking).

Vervolgens is het tijd om uw De belangrijkste vereisten. We vinden dat de meeste projecten passen in een van de volgende categorieën: verticale tillen/verlagen, horizontale glijdende beweging, scharnierende actuaties of een precisiegebaseerd project (bijvoorbeeld, bijvoorbeeld,boven, een Stewart -platform of wetenschappelijke testapparatuur). We zullen in dit artikel geen precisie aanpakken; Als u een precisie -applicatie ontwerpt, raden we aan om te beginnen met onze Arduino-gecontroleerde actuator tutorials
Verticale tillen en horizontale schuiftoepassingen zijn het eenvoudigst om te plannen - alles is parallel, dus er zijn geen extra berekeningen om uw slag- en gewichtsbeoordelingen te krijgen - alleen eenvoudige toevoeging en aftrekking.
Verticale liften
Een van de meest rechtdoorzee Toepassingen is een keukenapparaatlift of vervolgkeuzelijst-deze projecten zijn gebruikelijk genoeg dat we er een bijna alles-in-één actuatorkit voor hebben gemaakt! De keukenapparatuur liften zijn alleen In staat om in een verticale lijn te bewegen, met substantiële ondersteuning van het telescopische stalen frame.
Een van de meest veel gebruikt Verticale tillentoepassingen voor onze actuatoren is de Camper Van Bed Lift. Deze bewerking is een directe verticale beweging, meestal verspreid over 2-4 actuatoren en met een vereiste voor gelijkmatige, gesynchroniseerde beweging.
Beide bovenstaande projecten gebruiken hetzelfde principe, zoals het onderstaande voorbeeld. De actuator verplaatst iets in of uit de weg, in een rechte, eenvoudige, verticale beweging. De enige functioneel Verschillen tussen de projecten zijn de actuatorpositie ten opzichte van het bewegende object - de meeste bedliften hebben actuatoren onder het object; De meeste keukenapparatuurliften zijn eronder en achteren anderen kunnen dat zelfs zijn boven of grenzend aan het bewegende object. In sommige specifieke toepassingen kan een poelie worden gebruikt. Zolang de noch de actuator noch het bewegende object wordt belemmerd en de gemonteerde verbindingen zijn solide, de operatie zal werken.
Voor dit voorbeeld zullen we doen alsof we een 20 "pass-through venster dat moet worden getrokken omhoog en uit de weg voor gebruik. Het venster is 25 pond, inclusief het frame. Het venster is op tracks. We moeten hebben meer dan 25 pond push/pull, en op zijn minst een 20 -inch actuator (s).

De actuator (s) in deze bewerking kunnen in beide oriëntatie verticaal worden gemonteerd. Op de foto hierboven heeft één eenheid de staaf omhoog en een omlaag. De rode stippen vertegenwoordigen de beugels of bijlagen die nodig zijn voor beweging. Deze bewerking zou er twee kunnen gebruiken gesynchroniseerd Actuatoren, parallel gemonteerd, om te zorgen voor en zelfs beweging van het raam. Deze operatie zou kunnen Ook worden gedaan door een enkele actuator, boven het raam, uit het midden getrokken - het venster zou goed genoeg moeten worden gebalanceerd niet binden tijdens gebruik. Als dit een zorg is, raden we aan om een railglijbaan, ladeschuif of andere lineaire gids te gebruiken om een niet-bindende beweging te garanderen.
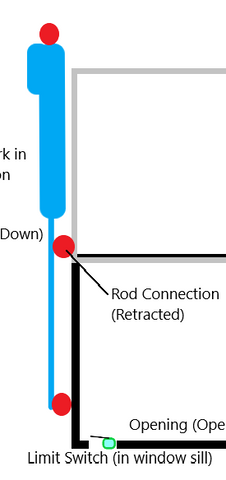
Vervolgens de werkelijke beweging. Dit venster is 20 "lang. Gebruik maken van een Premium lineaire actuator Voor dit voorbeeld; Op het moment van schrijven hebben we een 18 -inch optie en een optie 24 "slag - welke moeten we kiezen? De slag van de actuator is de Maximale hoeveelheid beweging U kunt van het apparaat komen. Jij kan altijd Beperk de beweging verder met externe limietschakelaars. Voor ons 20 "voorbeeld, een 18" actuator zou 2 ”van het venster achterlaten In de opening. Een 24 -inch eenheid, hoewel langer, kan worden beperkt tot de 20 "die we nodig hebben, zonder al te veel extra overweging. We willen niet dat de actuatoren dode drive zijn nadat het raam is gesloten, omdat dit het raam, iemands vingers, de actuator of al het bovenstaande kan schaden. We raden aan om een externe limietschakelaar te gebruiken om de bewerking te stoppen wanneer de gewenste beweging is voltooid. Klik hier Voor meer informatie over installeren en bedrading Externe limietschakelaars.
In het voorbeeldproject moeten we een externe limietschakelaar gebruiken om de actuator op de gesloten of verlaagd positie. Hiervoor zouden we de ingetrokken (omhoog) positie van het venster met de volledig ingetrokken positie van de actuator; Dit gebruikt de terugtrekking Interne limietschakelaar van de actuator om de beweging te beperken omhoog, En de externe limietschakelaar stopt de verlenging (verlagen) zodra het venster contact maakt met de dorpel.
We moeten de horizontaal Dimensie van het venster bedrading, Maar het zal geen effect hebben op de operatie.
Horizontale dia's
Een horizontale, glijdende werking kan op dezelfde manier worden berekend als een verticale werking, maar de belastingvereisten zullen veranderen. Gemeenschappelijke horizontale bewerkingen omvatten schuifladen of trappen, zij bewegende verborgen tv's of uitbreiding van platforms (zoals inzetbare zonnepanelen).

Bij het automatiseren van een horizontale beweging is de eerste stap om de te geautomatiseerde beweging te maken. De meeste projecten gebruiken hiervoor een ladeschuif of railglijbaan. In deze toepassing is de dia Eigenlijk Het ladengewicht dragen, dus het kiezen van de juiste lineaire gids of dia is van het grootste belang. U wilt eerst de lineaire dia -componenten installeren en ervoor zorgen dat de beweging werkt door de applicatie met uw hand te duwen (indien mogelijk).

We hebben al vastgesteld dat de actuator in deze toepassing dat doet niet Duw het volle gewicht van het object. In plaats daarvan hoeft de actuator alleen de wrijving Op de lineaire gidsen - afhankelijk van wat u hebt gebruikt, kan deze waarde erg laag zijn. Als u geen geschatte kracht-schatting kunt krijgen van het zelf verplaatsen van het object, kunt u het cumulatieve wrijving/koppel van uw dia's berekenen op basis van het gewicht van het bewegende object, zorg er dan voor dat de actuator die waarde overschrijdt. De laatste optie is om dat een actuator te selecteren zou kunnen verticaal tillen Het object, dat garandeert dat het het object door een horizontale schuifbeweging zal verplaatsen.
Scharnierende flappen of deksels
Ons derde gemeenschappelijke projecttype is een scharnierende toepassing. We hebben eigenlijk een rekenmachine Om hiermee te helpen - echter Dit artikel zal niet Adres hoe de lineaire actuatorcalculator te gebruiken. (Klik hier voor Lac Tutorial -artikel).

Een scharnierende applicatie vereist enige trigonometrie en eenvoudige fysica -berekeningen, indien helemaal opnieuw gedaan. Zoals altijd is de eerste stap om de beweging te definiëren en ervoor te zorgen dat het bewegende object effectief rond het scharnier kan verwoorden.

De ideale toepassing stelt de actuator in staat om het bewegende object op het bewegspad te duwen. Het bewegspad van dit object is een boog, in plaats van een rechte lijn - dit betekent dat de invalshoek van de actuator zal veranderen Tijdens de operatie - wat op zijn beurt betekent dat de tijdelijke vereiste kracht zal ook veranderen door de operatie. In deze situaties is de hoek van de actuator ten opzichte van het bewegende object (deksel of flap) erg belangrijk. De montageposities zullen deze hoek beïnvloeden, evenals de kracht; Dat heb je misschien gerealiseerd deze applicatie heeft 3 variabelen Dat veranderen allemaal en beïnvloeden de waarde van de anderen. Deze variabelen zijn de actuatorslaglengte, objectmontagepositie ten opzichte van het scharniergewricht en de vereiste actuatorkracht. Het wordt aanbevolen om zich te concentreren op de Afstanden en slag eerst, bereken vervolgens de gewichtsvereiste voor die respectieve positie.

Wanneer het flap/object ‘gesloten’ is en de actuator wordt ingetrokken, moeten de montagepunten de gat-tot-hole lengte van de ingetrokken actuator zijn, en wanneer het flap/object wordt geopend, moeten deze montagepunten de Uitgebreide actuatorlengte Afgezien - een te lang is een slag die is beperkt tot de juiste lengte, maar een te kort slag zal het object niet volledig verplaatsen. De eerder genoemde calculator is ontworpen om te helpen met deze schattingen. Klik hier voor die tutorial.

Als de montagepunten zijn Dichter bij het scharnier, de bewerking vereist een Hogere kracht, een kortere slagactuator. Als uw montagepunten verder van het scharnier zijn, kunt u een lagere kracht actuator met een langere slaglengte. Voor scharnierende projecten is er bijna Altijd een bereik van functionele actuatormogelijkheden, en het is aan jou om te bepalen welke van de opties past het beste bij uw project.
Je hebt misschien gerealiseerd dat we twee punten definiëren op een vlak dat een driehoek maakt wanneer ze worden geïmplementeerd - dit is de trigonometrie die kan worden gebruikt om een slaglengte helemaal opnieuw te berekenen. Deze redenering kan ook definiëren Twee mogelijke montagepunten, in deze situatie zal beide locaties werken, maar ze zullen altijd hebben verschillende belastingswaarden. Een voorbeeld van hoe dit eruit ziet is hieronder.
Montagepositie 1: Deze bewerking heeft een lager belastinggewicht, zoals de montageposities zijn dichter bij loodrecht Wanneer het object zich in de horizontale positie bevindt, dat is wanneer er de De meeste lading op de actuator. Het mechanische voordeel is hoger met dit ontwerp.

Montagepositie 2: Deze lay -out vereist een Hogere krachtactuator; Dit komt omdat de actuator schuift is richting het scharnier. Dit vereist meer kracht die nodig is Begin met bewegen het object.




