Lineaire actuatorsnelheidsregeling

Lineaire actuatoren spelen een cruciale rol in operaties binnen verschillende sectoren, waaronder gezondheidszorg, productie, landbouw, onder andere automotive; Daarom is de behoefte aan meer precisie en nauwkeurigheid essentieel. Lineaire actuatorsnelheidscontrollers bieden optimale besturingsmechanismen om beweging te reguleren met gewenste snelheden volgens de toepassingsvereisten.
De belangrijkste functies van lineaire actuatorsnelheidscontrollers reguleren de spanningsingang die wordt geleverd aan een elektromotor of actuator, terwijl ze nog steeds worden aangelegd met de belastingsvereisten bij maximale krachtuitgangscapaciteit - waardoor een grotere efficiëntie binnen dynamische systemen wordt gewaarborgd.
Het regelen van lineaire actuatorsnelheden vereist geavanceerde mechanismen zoals het implementeren van een snelheidscontrolelus waarbij feedbacklussen zijn verkregen uit ingebedde sensoren die veranderingen in positie of snelheid detecteren-dit helpt optimale resultaten te produceren door kalibratie. FIRGELLI'S Actuator Control Board beschikt over een eigen ingebouwde snelheidscontrolevoedingsfeedback-lus die optimale voorwaarden voor werking stelt en tegelijkertijd nauwkeurige bewegingen voor uw systeemverbeteringen zorgt.

FIRGELLI'S Actuator Control Board heeft een eigen ingebouwde snelheidsregeling Feedback Loop als u een feedback-gesloten lussysteem nodig heeft om snelheid zeer nauwkeurig te regelen. Deze schakelkast kan worden gebruikt met lineaire actuatoren die feedbacksensoren hebben ingebouwd, Soch als Hall Sensro of Optical Sensor, omdat het deze sensoren nodig heeft om de snelheid van de acuator te meten.
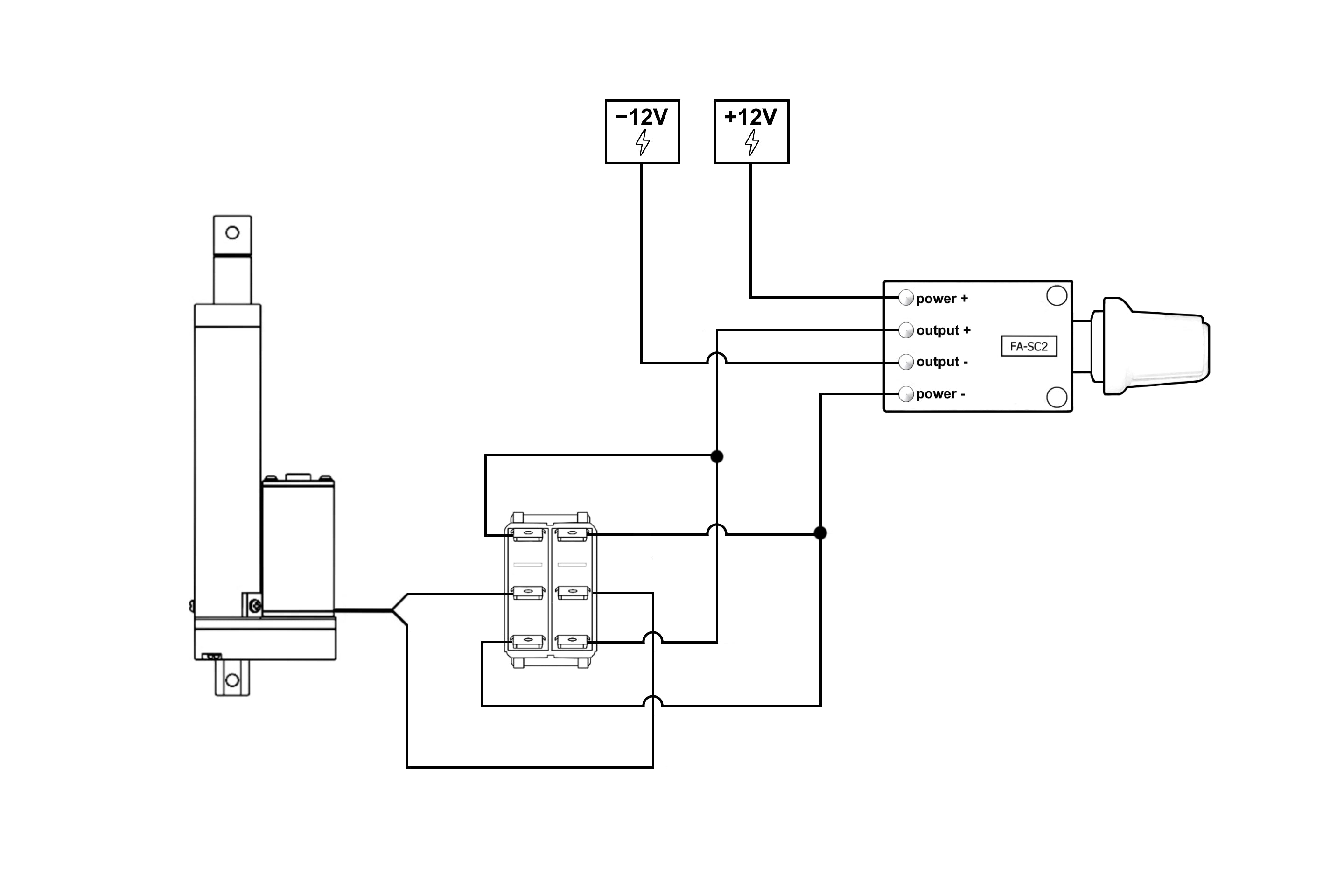
Om precisie te garanderen en fouten te voorkomen, controleren lineaire actuatoren die door Speed Controllers continu hun snelheden volgen en opnieuw beoordelen. Het volgende bedradingsdiagram illustreert hoe een lineaire actuator aan te sluiten op een rocker -schakelaar en snelheidscontroller voor optimale prestaties en besturingselement.
Bedradingsschema voor een snelheidscontroller en een actuator
Feed-forward controle
In de context van lineaire actuatoren en snelheidscontrole is feed-forward controle een cruciaal concept. Deze aanpak werkt in de veronderstelling dat de gebruiker als de controller de uitvoer van de snelheidscontroller nauwkeurig kan voorspellen en de nodige aanpassingen dienovereenkomstig kan maken. Het primaire doel van een controlelus voor snelheidsregulering is het optimaliseren van de snelheid van de actuator om aan te passen aan de vereisten van een specifieke taak. Op voorwaarde dat alle variabelen constant blijven, stelt Feed-Forward Control gebruikers in staat om geïnformeerde voorspellingen te doen met betrekking tot de relatie tussen de werkcyclus van de actuator en de snelheid ervan, op basis van sensorwaarden per seconde.
Door de duty -cyclus te berekenen, kunnen gebruikers de gewenste snelheid nauwkeurig bereiken en tegelijkertijd fouten in schatting minimaliseren. Deze benadering vermindert het risico van overschrijding en het missen van het doel volledig, of stopt voortijdig voordat het doel wordt bereikt, waardoor de fundamentele doelstelling wordt ondermijnd om een lineaire actuator te gebruiken.
Hoe een DC -snelheidscontroller de snelheid van een actuator regelt
Een DC -snelheidscontroller die gebruik maakt van pulsbreedtemodulatie (PWM) is een geavanceerd elektronisch apparaat dat is ontworpen om de snelheid van een DC -actuator. PWM is een techniek die controle van de gemiddelde spanning mogelijk maakt die aan een DC -motor wordt geleverd door het vermogen snel in en uit te schakelen met een constante frequentie. De snelheid van de DC -actuator kan worden gemoduleerd door de Time (Duty Cycle) aan te passen ten opzichte van de UIT -tijd binnen elke cyclus.
Hier is een overzicht van hoe een DC -snelheidscontroller die PWM gebruikt werkt om de snelheid van een DC -actuator te regelen:
- Frequentie: De PWM -controller genereert een constant frequentie -vierkant golfsignaal, dat bestaat uit afwisselende periodes. Deze frequentie is meestal hoog genoeg dat de motor van de actuator de schakelactie niet waarneemt, wat resulteert in gladde snelheidsregeling.
- Arbeidscyclus: De arbeidscyclus Verwijst naar het percentage van de tijd dat het signaal gedurende een enkele cyclus in de ON -toestand blijft. Door de dienstcyclus te variëren, kan de gemiddelde spanning die aan de motor van de actuator wordt geleverd, worden geregeld. Een hogere dienstcyclus komt overeen met een hogere gemiddelde spanning, wat leidt tot een snellere actuatorsnelheid, terwijl een lagere duty -cyclus resulteert in een lagere gemiddelde spanning en bijgevolg lagere actuatorsnelheid.
- Modulatie: Aangezien de gebruiker of een geautomatiseerd systeem de gewenste snelheid van de DC -actuator aanpast, wijzigt de PWM -controller de duty -cyclus dienovereenkomstig. Dit zorgt ervoor dat de juiste gemiddelde spanning aan de actuator wordt geleverd, waardoor precieze controle over zijn snelheid mogelijk is.
- Efficiëntie: Aangezien de PWM -snelheidscontroller snel schakelt tussen volledig aan en volledig uit -toestanden, worden energieverliezen in de vorm van warmte geminimaliseerd. Dit maakt PWM een zeer efficiënte methode voor het regelen van de snelheid van een DC -actuator.
Samenvattend is een DC -snelheidscontroller die PWM -werken gebruikt door een vierkant golfsignaal te genereren met een constante frequentie en variërende werkcyclus. Door de duty -cyclus aan te passen, moduleert de controller de gemiddelde spanning die wordt geleverd aan de motor van de DC -actuator, waardoor nauwkeurige controle over zijn snelheid mogelijk is met behoud van hoge energie -efficiëntie.
Waarom zou je een snelheidscontroller willen gebruiken?
-
Precisiebeheersing: Het primaire voordeel van een snelheidscontroller is het vermogen om precieze controle te geven over de snelheid van de actuator. Deze functie stelt mensen in staat om de snelheid van de actuator te verfijnen, waardoor deze optimaal werkt voor de specifieke taak of applicatie die bij de hand ligt. Door de gewenste snelheid met nauwkeurigheid te bereiken, kunt u de algehele prestaties en effectiviteit van het systeem verbeteren.
-
Aanpassingsvermogen: Verschillende toepassingen vereisen vaak variërende snelheidsvereisten of vereisen aanpassingen tijdens de werking. De FIRGELLI Speed Controller biedt u de flexibiliteit om de snelheid van de actuator gemakkelijk aan te passen en aan te passen om aan de unieke eisen van elke applicatie te voldoen. Dit aanpassingsvermogen stelt ingenieurs in staat om de systeemprestaties in verschillende scenario's te optimaliseren.
-
Soepele werking: Speed -controllers, met name die met behulp van pulsbreedtemodulatie (PWM) -technologie die de meeste juiste snelheidscontrollers doen, bieden het voordeel van het leveren van soepele en consistente controle over de snelheid van de actuator. Deze soepele werking is cruciaal omdat het mechanische stress en slijtage op de actuator minimaliseert, waardoor de levensduur van de services wordt verlengd.
-
Synchronisatie: Bepaalde toepassingen hebben gesynchroniseerde beweging nodig bij meerdere actuatoren. In dergelijke gevallen spelen snelheidscontrollers een cruciale rol bij het handhaven van de consistente snelheid over alle betrokken actuatoren. Deze synchronisatie zorgt voor precieze coördinatie en harmonieuze werking, wat resulteert in een geoptimaliseerde prestaties en functionaliteit van het systeem als geheel.
Wat is het hoge pitch -geluid dat je hoort uit de snelheidscontroller terwijl je de snelheid lager en lager maakt?
Het hoge geluid dat je hoort afkomstig van de snelheidscontroller terwijl je de snelheid lager en lager draait, wordt meestal veroorzaakt door de schakelfrequentie van de pulsbreedtemodulatie (PWM) -techniek die wordt gebruikt om de snelheid van de actuator te reguleren.
PWM omvat het snel om de voeding naar de motor in en uit te schakelen met een constante frequentie. Wanneer de snelheid wordt verlaagd, neemt de werkcyclus (het percentage van de tijd van het signaal in de toestand) af, waardoor de motor minder gemiddelde spanning ontvangt. In sommige gevallen kan de PWM -frequentie of zijn harmonischen binnen het hoorbare bereik van het menselijk gehoor vallen (20 Hz tot 20 kHz).
Het geluid kan worden gegenereerd vanwege de trillingen van de motorspoelen of andere componenten in de snelheidscontroller, die resoneren bij de PWM -frequentie of zijn harmonischen. Deze vibratie wordt veroorzaakt door de snelle expansie en samentrekking van het magnetische veld dat wordt gegenereerd door de elektrische stroom in de motorspoelen terwijl ze schakelen tussen en uit -toestanden.
Naarmate de snelheid lager wordt gedraaid, neemt de duty -cyclus af en ontvangt de motor minder vermogen tijdens elke schakelcyclus. Deze stroomverandering kan ervoor zorgen dat het hoorbare geluid meer uitgesproken wordt. Bovendien kunnen bepaalde resonantiefrequenties van het systeem gevoeliger zijn voor het produceren van hoorbare ruis, afhankelijk van de mechanische en elektrische kenmerken van de motor- en snelheidscontroller.




