Nadat je klaar bent met flitsende LED's op totaal unieke en prachtige manieren, wil je daadwerkelijk communiceren met de fysieke omgeving. Hier komen lineaire actuatoren binnen. Als je iets wilt verplaatsen, iets opent, iets draait, is een lineaire actuator waarschijnlijk de beste manier om het te doen. En waarom het tillen, bewegen, jezelf draaien wanneer je een lineaire actuator kunt krijgen om het harde werk te doen.
Natuurlijk kunt u op een knop op een afstandsbediening of een rocker -schakelaar drukken, maar waarom geen bewegingssensor of zelfs een realtime klok voor tijdgebaseerde gebeurtenissen.
Als je gewoon in Arduino gaat, weet je misschien niet dat je niet alleen een grote motor kunt verbinden met de pennen van het bord en deze niet kunt verplaatsen. U moet een schakelmechanisme gebruiken om de hoge stroombelasting te dragen. U kunt een motordriver of H-brug gebruiken, maar de eenvoudigste, snelste manier is om een paar relais of een relaisbord te gebruiken. Je hebt twee opties bij het gebruik van een Arduino met een lineaire actuator. U kunt gewoon het relaisbord gebruiken om de stroom te regelen die naar de actuator gaat zonder positie-informatie, of als u een van de FA-PO-feedback-actuatoren gebruikt, kunt u de aspositie bepalen en een gesloten luspositiecontrole maken. In dit artikel gaan we ons concentreren op de eenvoudigere optie, alleen de relais gebruiken om de actuator te besturen en geen positie -informatie.
Zorg ervoor dat u relais (of een relaisbord) gebruikt met SPDT -relais. SPDT (dubbele pool dubbele worp) Relais hebben drie verbindingen voor elk relais. Gemeenschappelijk, normaal open, normaal gesloten. We zullen meer in detail gaan over relais in een ander artikel, zorg ervoor dat je SPDT -relais krijgt, anders werkt het niet. U hebt twee SPDT -relais nodig om de actuator te besturen. Met twee SPDT -relais kunt u beginnen, stoppen en van richting van de actuator veranderen.
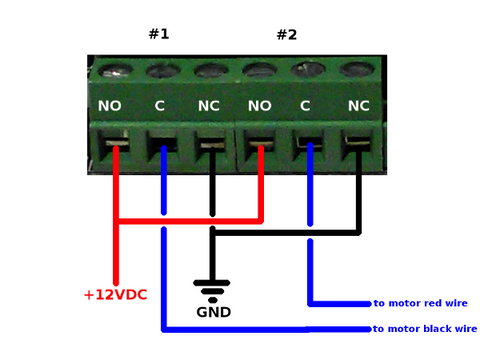
Zoals u in het bedradingsschema hieronder kunt zien, sluit u uw 12VDC -grond aan op de normaal gesloten terminal van de twee relais en verbindt u uw +12VDC op de normaal open terminal van de twee relais. U kunt een kruising maken om elke draad in twee te splitsen of een korte jumperdraad te gebruiken. U sluit de twee actuatordraden aan op de gemeenschappelijke terminal, één op elk relais.
Laten we aannemen dat digitale pennen 2 en 3 voor de Arduino -code de twee relais moeten besturen. Je moet controleren wat het op je bord staat. Hier is een eenvoudig codefragment dat laat zien hoe u de lineaire actuator kunt uitbreiden, intrekken en stoppen.
const int RELAY_1_A = 2; const int RELAY_1_B = 3; void setup() { pinMode(RELAY_1_A, OUTPUT);inteken actuator) {pinMode(RELAY_1_B, OUTPUT);} leegte loop() { //This is where your program logic goes //You can call the functions to control the //actuator here, as well as reading sensors, etc.. } leegte extendactuator (inteken Actuator) {// Stel het ene relais in en de andere uit // Dit zal de actuator uitbreiden digitalwrite(Relay_1_a, HOOG); digitalwrite(Relay_1_b, LAAG); } leegte intrekactuator (
// Stel een relais in en de andere op
// Dit zal de actuator verplaatsen
digitalwrite(Relay_1_a, LAAG);
digitalwrite(Relay_1_b, HOOG);
}
leegte stopactuator (inteken actuator) {
// Stel beide relais uit
// Dit stopt de actuator in een remmen
digitalwrite(Relay_1_a, LAAG);
digitalwrite(Relay_1_b, LAAG); }
Dit zou je moeten laten doorgaan met een Arduino (of andere microcontroller) met relais om een te besturen Firgelli Automatisering lineaire actuator.
Als u op zoek bent naar welke lineaire actuator u moet beginnen, bel ons dan of stuur ons een e -mail op onze technische lijn. Als u op zoek bent naar een solide werkpaardactuator, bekijk dan de Light Duty Series lineaire actuators We dragen, of de Lichte eenheden met feedback van potentiometer. Vergeet niet een goede 12VDC -voeding die inductieve belastingen aankan. MB1 Beugels voor lineaire actuatoren (MB1 voor de FA-150-serie) bespaart u veel tijd en frustratie.



