Het gebruik van feedback om ervoor te zorgen dat precieze bewegingen de sleutel is in elk automatiseringsproject van robot tot tv -liften. Een juiste implementatie van feedback zorgt voor een nauwkeurige gesloten lusbesturing van uw lineaire actuator; U hoeft niet langer handmatig te controleren dat uw lineaire actuator naar de juiste positie gaat. Aangezien lineaire actuatoren meestal worden gebruikt om een object van de ene positie naar de andere te verplaatsen, is de belangrijkste feedback die u van uw actuator kunt ontvangen zijn positie. Lineaire actuatoren die positionele feedback hebben, meten meestal de positie met behulp van een van de 3 verschillende sensoren; Potentiometers, Hall Effect -sensoren en optische sensoren.
Potentiometers
Potentiometers zijn variabele weerstanden die bij gebruik in lineaire actuatoren, hun weerstand verandert op basis van de positie van de actuator. Potentiometers zullen uit de 3 pennen bestaan zoals hieronder weergegeven, pin 1 is de ingangsspanning, pin 3 is gemalen en pin 2 is de verstelbare weerstand. U kunt de uitvoer van de potentiometers lezen door de spanning tussen pin 2 en grond te meten, die zal veranderen naarmate de actuator beweegt. Effectief Implementeer deze feedback, u moet gebruik maken van een soort controller, zoals een Arduino, om deze positionele waarde te lezen terwijl de actuator beweegt.

Een van de grootste sterke punten van een potentiometer is dat het een indicatie geeft van de absolute positie van de lineaire actuator. Daarom kan deze feedback vrij eenvoudig te hanteren zijn in de software van een controller, omdat u eenvoudig de huidige uitvoerlezing kunt vergelijken met de uitvoerlezing van uw gewenste positie. U hoeft zich ook nooit zorgen te maken over het verliezen van de positie van uw actuator als u uw systeem uitschakelt, omdat de weerstand van de potentiometer hetzelfde zal zijn, ongeacht het vermogen of niet.

Er zijn weinig nadelen van het gebruik van potentiometers voor positionele feedback. Een nadeel is dat de feedback van de potentiometer kan worden beïnvloed door elektrische ruis en dat u het signaal kan filteren om stabiele resultaten te bereiken. De uitgang van de potentiometer is ook afhankelijk van de ingangsspanning van de potentiometer, waardoor het moeilijk kan zijn om ervoor te zorgen dat meerdere lineaire actuatoren tegelijkertijd bewegen, omdat het uitgangssignaal enigszins kan variëren vanwege lichte wijzigingen in de ingangsspanning. Ook zullen potentiometers over het algemeen niet zo gevoelig zijn voor kleinere bewegingen van de lineaire actuator, vergeleken met de andere feedbackopties, waardoor herhaalbare resultaten moeilijker worden.
Hall Effect Sensor
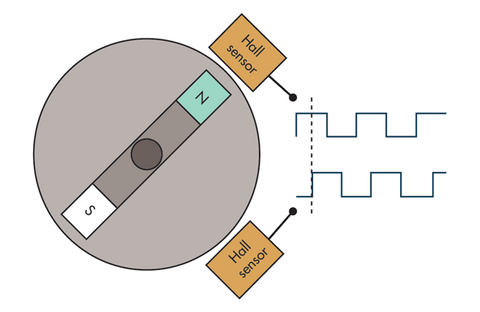
Hall Effect Sensors Werk op basis van het Hall -effect dat het effect is van een magnetisch veld om een spanning te produceren. Hall Effect -sensoren kunnen een digitale of lineaire uitvoer bieden, maar voor lineaire actuatoren gebruiken ze meestal digitale uitgangshal -effectsensoren. Wanneer deze sensoren een magnetisch veld detecteren, produceren ze een spanning die kan worden gelezen door een controller [1]. Met lineaire actuatoren bevinden deze sensoren zich in de versnellingsbak van de actuator samen met een magnetische schijf. Terwijl de lineaire actuator beweegt, passeert deze magnetische schijf de Hall -effectsensor die een spanningspuls produceert. Deze pulsen kunnen worden gebruikt om te bepalen Hoe ver is de actuator verhuisd. Over het algemeen zullen lineaire actuatoren die Hall Effect -sensoren gebruiken om positionele feedback te geven, de puls per reisde inch specificeren die u kunt gebruiken om te bepalen hoe ver de actuator beweegt. Als u bijvoorbeeld 6000 pulsen hebt gedetecteerd en uw actuator een puls per inch van 12000 heeft, betekent dit dat uw actuator 0,5 inch is verplaatst.
Het belangrijkste nadeel van het gebruik van een Hall -effectsensor voor positionele feedback in vergelijking met een potentiometer is dat Hall Effect -sensoren geen absolute positie meten. In plaats daarvan produceren ze pulsen die kunnen worden geteld om te bepalen hoe ver de actuator is verplaatst, waardoor u weet waar de actuator de absolute positie begint te bepalen. Dit kan worden overwonnen in software van uw controller, zoals in een Arduino, door de huidige positie van de actuator op te slaan en de actuator altijd vanuit een bekende positie te starten, zoals volledig ingetrokken. Dit kan vereisen dat u de actuator naar deze bekende positie thuisbrengt telkens wanneer u uw systeem aanzet.
De sterkte van het gebruik van een Hall -effectsensor voor positionele feedback is dat deze een veel grotere resolutie biedt in vergelijking met de feedback van een potentiometer. Aangezien er duizenden pulsen per inch beweging kunnen zijn, bieden Hall Effect -sensoren een precisie en betrouwbaarheid bij het positioneren van uw lineaire actuator. De pulsen variëren ook in frequentie op basis van de snelheid van uw lineaire actuator, wat betekent dat u ze kunt gebruiken om de snelheid van uw lineaire actuator te meten. Hall Effect -sensoren bieden ook een groter vermogen om ervoor te zorgen dat meerdere lineaire actuatoren tegelijkertijd samen bewegen, omdat de pulstellingen nauwkeuriger zijn dan de veranderende spanning van de potentiometer. Gebruik maken van onze FA-SYNC-X Actuator Controller, u kunt er zelfs voor zorgen dat de actuatoren zich in het keren bewegen, ongeacht de belasting.
Optische sensor
Optische sensoren die worden gebruikt in lineaire actuatoren (er zijn andere type optische sensoren) functioneren zeer vergelijkbaar met Hall -effectsensoren, behalve dat ze licht detecteren met behulp van een fotodetector [2]. Optische sensoren werken door licht van een LED of een andere lichtbron te hebben door een encoderschijf doorgegeven. Deze encoderschijf wordt gesloten zodat het licht er periodiek doorheen kan gaan. Aan de andere kant van de schijf bevindt zich de fotodetector, die het licht detecteert wanneer het door de slots in de schijf gaat en een uitgangssignaal maakt [3]. Terwijl de actuator beweegt, roteert de encoderschijf en wordt licht gedetecteerd door de fotodetector die een spanningspuls produceert. Deze pulsen kunnen op dezelfde manier worden gebruikt als de pulsen van een Hall -effectsensor om te bepalen Hoe ver is de actuator verhuisd. Lineaire actuatoren die optische sensoren gebruiken voor positionele feedback, specificeren ook de puls per reisde inch die u kunt gebruiken om te bepalen hoe ver de actuator beweegt.

Optische sensoren hebben opnieuw vergelijkbare sterkten en nadelen als Hall Effect -sensoren in vergelijking met potentiometers. Ze hebben een grotere nauwkeurigheid en resolutie, zelfs groter dan Hall Effect -sensoren, en kunnen worden gebruikt om de snelheid van de lineaire actuator te meten. Ze zijn er ook beter in om ervoor te zorgen dat uw meerdere lineaire actuatoren tegelijkertijd bewegen en kunnen gebruik maken van de FA-SYNC-X Actuator Controller. Ze meten ook geen absolute positie en vereisen in plaats daarvan dat u Pulse telt om te bepalen in hoeverre uw actuator is verplaatst. U moet ook in een bekende positie beginnen, omdat u de huidige positie in software moet opslaan om de absolute positie bij te houden.
Samenvatting
Uw keuze van het type feedback dat u wilt van uw lineaire actuator zal afhangen van wat u vindt dat belangrijker is voor uw toepassing. Heeft u een hoog niveau van nauwkeurigheid nodig? Kies een lineaire actuator met optische of Hall -effectsensor. Wilt u uw actuator niet op een thuispositie instellen telkens wanneer u deze inschakelt? Ga dan met een lineaire actuator met een potentiometer. Wilt u meerdere lineaire actuatoren tegelijkertijd besturen? Kies een lineaire actuator met optische of Hall -effectsensor. Wilt u dat uw feedback een absolute positie biedt? Ga met een lineaire actuator met een potentiometer.
[1] Monari, G. (juni 2013) Inzicht in resolutie in optische en magnetische encoders. Opgehaald van: https://www.electronicdesign.com/technologies/components/article/21798142/understanding-resolution-in-optical-and-magnetic-encoders
[2] Paschotta, R. Artikel over optische sensoren. Opgehaald van:https://www.rp-photonics.com/optical_sensors.html



