Tốc độ của bộ truyền động tuyến tính có thể được kiểm soát theo nhiều cách, bao gồm:
- PWM (Điều chế độ rộng xung) - Phương pháp này liên quan đến việc kiểm soát chu kỳ nhiệm vụ của sóng vuông để kiểm soát điện áp trung bình đặt vào bộ truyền động, ảnh hưởng đến tốc độ của nó.
- Điện áp thay đổi - Bằng cách điều chỉnh điện áp cấp vào bộ truyền động, bạn có thể kiểm soát tốc độ của nó.
- Mạch điều khiển - Bạn có thể sử dụng mạch điều khiển bên ngoài, chẳng hạn như bộ vi điều khiển hoặc bộ điều khiển logic khả trình (PLC), để điều chỉnh tốc độ của bộ truyền động.
- Kiểm soát phản hồi - Bằng cách sử dụng phản hồi từ cảm biến vị trí, bạn có thể kiểm soát tốc độ và vị trí của bộ truyền động.
Phương pháp được sử dụng sẽ phụ thuộc vào ứng dụng cụ thể và loại thiết bị truyền động tuyến tính đang được sử dụng.
Firgelli Thiêt bị điêu khiển tôc độ
FA-SC1 Bộ điều khiển tốc độ thiết bị truyền động là một cách nhanh chóng và hiệu quả để thay đổi tốc độ của Firgelli Thiết bị truyền động tuyến tính 12V. Bộ điều khiển tốc độ có thể được đặt bằng công tắc DIP bốn vị trí hoặc đầu vào điện áp bên ngoài.
Tổng quan về bo mạch
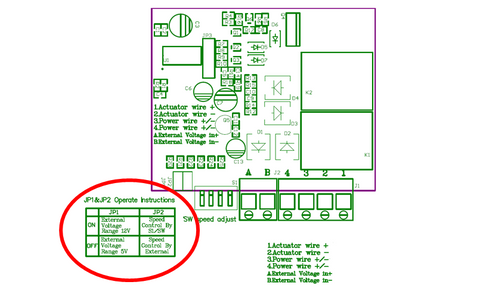
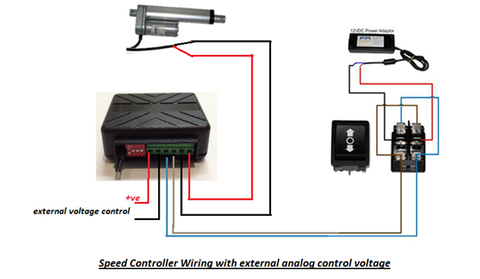
Như được minh họa trong sơ đồ trên, các đầu vít 1 và 2 kết nối với bộ truyền động, các đầu vít 3 và 4 kết nối với nguồn điện, còn các đầu vít A và B kết nối với tín hiệu điện áp bên ngoài tùy chọn. Chân jumper 2 cho bo mạch biết tốc độ đang được điều khiển bởi công tắc DIP hay tín hiệu điện áp bên ngoài, và chân jumper 1 cho bo mạch biết điện áp bên ngoài này là 5V hay 12V (xem bảng được khoanh tròn màu đỏ).
Cảnh báo chung:
- ĐỪNG đảo ngược cực tính của điện áp điều khiển bên ngoài; thiết bị sẽ bị hỏng vĩnh viễn nếu đảo cực.
- FA-SC1 nhằm mục đích kiểm soát tốc độ của một bộ truyền động tuyến tính. KHÔNG kết nối hai bộ truyền động với cùng một FA-SC1. Khả năng hiện tại tối đa của thiết bị là 10A; ngay cả hai bộ truyền động nhỏ được kết nối với nhau với Bộ điều khiển tốc độ cũng có thể tạo ra dòng điện khởi động vượt quá 10A và sẽ làm hỏng thiết bị.
Kiểm soát tốc độ bằng cài đặt công tắc DIP
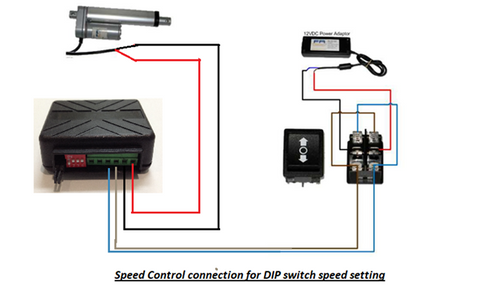
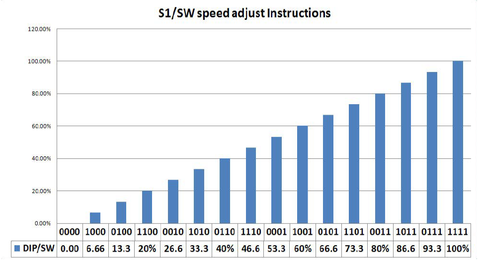
Để đặt tốc độ bằng công tắc DIP thủ công, trước tiên hãy thực hiện kết nối như minh họa trong sơ đồ trên. Sau đó, bạn có thể đặt tốc độ của bộ truyền động bằng cách đặt công tắc DIP sang một trong 16 tốc độ khác nhau như minh họa trong bảng bên dưới. Hãy thử nghiệm để tìm ra tốc độ lý tưởng của bạn.
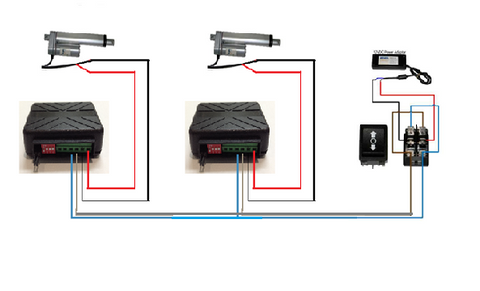
(Gần) điều khiển đồng bộ hai hoặc nhiều bộ truyền động tuyến tính
Có thể nảy sinh tình huống trong đó bạn có hai hoặc nhiều bộ truyền động tuyến tính không có phản hồi bên trong nhưng bạn vẫn muốn chúng chuyển động đồng bộ với nhau. Mặc dù chúng tôi luôn khuyên bạn nên sử dụng bộ truyền động dòng Quang học hoặc Bullet với Bảng điều khiển FA-SYNC-2 hoặc FA-SYNC-4, bạn có thể đã mua bộ truyền động mà không có phản hồi.
Để di chuyển chúng ở tốc độ gần như nhau, bạn có thể kết nối một bộ điều khiển tốc độ với mỗi bộ truyền động như minh họa trong sơ đồ sau và sau đó điều chỉnh chúng theo cách thủ công cho đến khi chúng di chuyển ở cùng tốc độ. Xin lưu ý rằng không thể đạt được điều khiển đồng bộ hoàn hảo bằng phương pháp này.
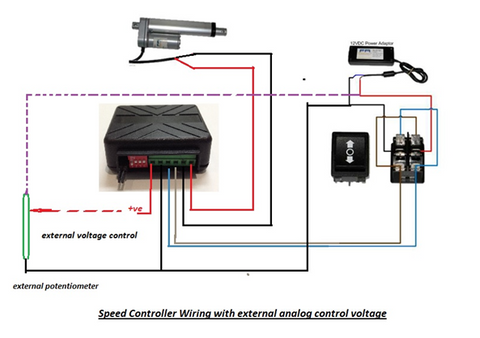
Kiểm soát tốc độ bằng chiết áp
Thay vì sử dụng công tắc DIP, bảng điều khiển này cho phép bạn thay đổi tốc độ theo điện áp bên ngoài. Bằng cách sử dụng chiết áp, chúng ta có thể tạo ra một bộ chia điện áp thay đổi. Thực hiện các kết nối như trong sơ đồ bên dưới và tháo chân nối 2. Nếu bạn đang sử dụng điện áp bên ngoài là 5V, hãy tháo chân nối 1, nếu không, nếu điện áp bên ngoài là 12V thì hãy kết nối chân nối 1. Sau khi hoàn thành việc này, bạn có thể thay đổi tốc độ của bộ truyền động bằng cách xoay chiết áp.
Kiểm soát tốc độ bằng vi điều khiển/PLC
Tùy chọn cuối cùng để thay đổi tốc độ của bộ truyền động tuyến tính của bạn là sử dụng điện áp bên ngoài được cung cấp bởi PLC hoặc vi điều khiển như Arduino. Thực hiện các kết nối được hiển thị trong sơ đồ bên dưới. Loại bỏ chân nhảy 2 và nếu sử dụng 5V làm điện áp bên ngoài (chẳng hạn như từ Arduino), hãy loại bỏ chân nhảy 1. Ngược lại, nếu bạn đang sử dụng điện áp bên ngoài 12V, hãy kết nối chân cắm 1.