«Почему мои приводы не двигаются синхронно, если они подключены к одному источнику питания 12 В?»

Многие клиенты полагаются на линейные приводы Firgelli для автоматизации подъема крышки люка на своем грузовике, для скрытия люка, ведущего в винный погреб, или для активации воздушный тормоз на Lamborghini. Для реализации этих проектов два исполнительных механизма могут быть размещены по обе стороны от люка, чтобы поднять его, но иногда клиент обращается к нам и сообщает нам, что либо его люк сломался, либо двигатель сгорел, потому что исполнительные механизмы не двигались с одинаковой скоростью.
В чем дело? К счастью, мы можем с уверенностью сказать, что это не конструктивная ошибка наших линейных приводов, а внутреннее свойство всех двигателей постоянного тока. Будь то наш или конкурент, два двигателя постоянного тока никогда не будет двигаться идеально синхронно друг с другом без замкнутого контура обратной связи с помощью энкодера.
Для этого есть множество причин, включая, помимо прочего:
- Производственные допуски с учетом небольших отклонений
- К каждому валу двигателя прилагаются разные нагрузки / моменты.
- Вариации трения втулки / подшипника
- Различия в механическом износе
Эти небольшие различия складываются вместе, и можно ожидать 5-10% разницы в скорости между двигателями постоянного тока или линейными приводами. К счастью, есть несколько способов преодолеть эту врожденную разницу в скорости.
Как запустить линейные приводы с одинаковой скоростью
Если вы приобрели (или планируете приобрести) линейный привод со стержнем обратной связи, линейный привод с оптической обратной связью, Пуля серии 36 Cal, или Линейный привод Bullet Series 50 Cal, этот раздел предоставит информацию о том, как перемещать их синхронно.
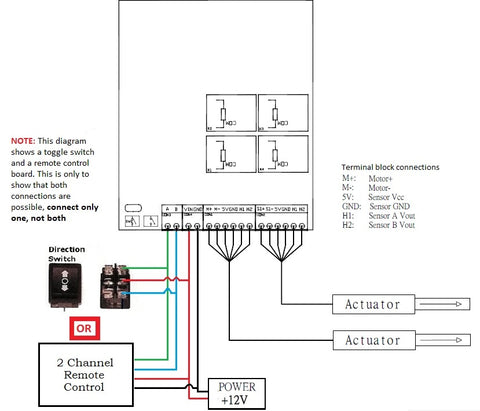
1) Синхронный блок FA-SYNC-4 или FA-SYNC-2 (настоятельно рекомендуется)
В блок синхронного управления на сегодняшний день является наиболее надежным методом синхронизации движения от двух до четырех линейных приводов. Вам понадобится такой же тип привода исключительно из следующего списка:
- Оптический привод 200 фунтов
- Привод Optical Series 400 фунтов
- 12В Bullet Series 36 Cal. Привод
- 12В Bullet Series 50 Cal. Привод
Этот блок управления предлагает готовое решение по принципу «включай и работай». После подключения все, что вам нужно сделать, это нажать кнопку, и система выполнит автоматическую калибровку, после чего вы сможете интуитивно управлять одновременно до 4 исполнительных механизмов под любым нагрузка. Увидеть этот специальное руководство по использованию блоков синхронного управления FA-SYNC-2 и FA-SYNC-4.
2) Контакты прерывания Arduino
Этот метод будет работать с сериями Optical и Bullet, эти актуаторы имеют оптические энкодеры и энкодеры на эффекте Холла соответственно. Подсчитав количество импульсов, можно вычислить смещение стержня. Применение алгоритмов управления позволяет осуществлять синхронное управление. Это требует, чтобы вы подключили сигнал от кодировщиков к контактам прерывания Arduino. Это продвинутый проект; мы не обеспечиваем поддержку программного обеспечения или программирования.
3) Аналоговые контакты Arduino
Этот метод будет работать только с линейный привод со стержнем обратной связи. Линейный привод со стержнем обратной связи имеет встроенный потенциометр, дающий аналоговый выход, который можно считывать и преобразовывать в показания положения. Учебное пособие о том, как это сделать с помощью Arduino, связано Вот; Хотя это руководство является подробным, предполагаются некоторые знания программирования и Arduino. Кроме того, в этом руководстве показано только, как получить показания датчика; Вы должны написать программное обеспечение для синхронного управления. Это продвинутый проект; мы не обеспечиваем поддержку программного обеспечения или программирования.
Как запустить линейные приводы с (почти) одинаковой скоростью
В этом разделе будет рассмотрено, как перемещать линейные приводы, не имеющие встроенных энкодеров для управления с обратной связью. Если вы еще не приобрели линейные приводы, мы предлагаем пропустить этот раздел и придерживаться методов, описанных в предыдущем разделе, в которых используются линейные приводы Фиргелли со встроенными датчиками положения. Однако, если вы уже приобрели линейный привод, который не имеет этих встроенных датчиков положения, таких как Фирджелли Классик или Фирджелли Премиум линейные приводы и по-прежнему хотите перемещать их с (почти) той же скоростью, продолжайте читать этот раздел.
Заметка: мы постоянно говорим (почти) о одинаковой скорости, потому что физически невозможно перемещать приводы с точно такой же скоростью без управления с обратной связью с обратной связью.
1) Ничего не делать
Самым простым решением может быть не беспокоиться о небольшой разнице в скорости 5-10%, особенно если ход вашего привода небольшой (<6 дюймов), поскольку они не будут слишком сильно отличаться по высоте. Вместо этого внесите некоторую гибкость в вашу систему, например, если вы строите люк с двумя исполнительными механизмами, вы можете спроектировать его так, чтобы корпус люка мог слегка вращаться / поворачиваться, чтобы любая разница в скорости исполнительного механизма была поглощена системой.
2) Регулятор скорости
Если один привод движется быстрее, чем второй, вы можете использовать регулятор скорости на быстродействующем приводе, чтобы уменьшить его скорость. Этот блок управления использует широтно-импульсную модуляцию (ШИМ) для регулировки скорости, с которой движется привод. Для получения дополнительной информации см. Наш учебник: Как использовать регуляторы скорости с линейными приводами Фирджелли. Регулировка скорости - это искусство, и она не приведет к идеальному согласованию скоростей между несколькими приводами, но это лучший результат, когда не используется обратная связь.
3) Контроль скорости Arduino
Вместо того, чтобы использовать наш стандартный контроллер скорости, вы можете использовать Arduino для изменения скорости исполнительных механизмов с помощью сигнала ШИМ. Мы не рекомендуем этот метод, если у вас еще нет опыта работы с Arduino. Хотя Firgelli не предоставляет Arduino или поддержку программирования, у нас есть обзорное руководство по как изменять скорость с помощью Arduino и драйвера двигателя.



