Новый проект автоматизации может оказаться пугающим; мы знаем. Со всеми техническими терминами, электропроводкой, интерфейсами компьютерного управления и другими прибамбасами может быть трудно даже понять, гденачинать! Когда неопределенность мешает развитию вашего проекта, возвращение к основам и анализ требований вашего проекта могут указать вам путь вперед. Мне нравится говорить, что знание – сила, нопонимание является валютой.
При запуске нового проекта автоматизации или переоборудовании и замене линейного привода в существующем проекте эти вопросы помогут вам определить, какой привод подойдет для вашего проекта.
- Что такое приложение?
- Вы устанавливаете привод в существующую конструкцию или продукт?
- Вы разрабатываете новый проект с нуля?
- Какова нагрузка на устройство или какая сила вам нужна?*
- Номинальный вес привода указан для только осевые нагрузки. Для нелинейных применений (например, петель) может потребоваться расчет осевой нагрузки.
- Какой ход («путешествие») вам нужен?
- Требуемая скорость движения?
- Привод Скорость движения и номинальная сила обратно пропорциональны. Возможно, вам придется выбирать между желаемой скоростью или желаемой силой, в зависимости от приложения.
- Как часто вам нужно, чтобы он работал?
- Рассчитываем рабочие циклы при 5 минутах постоянное использование(в движение); для большинства непромышленных приложений не требуется учитывать рабочие циклы.
- Другие условия?
- Такие функции, как защита от столкновений, снижение скорости или регулирование скорости, могут быть включены в дополнительные компоненты.
- Другие функции иногда можно реализовать с помощью реле, схем управления и креативной проводки.
Как только все вышеперечисленные критерии понятны, вы готовы построить свою систему из компонентов. Базовая система привода требует следующих частей:
- Привод(ы) & Монтажные кронштейны - Кронштейны зависят от привода. Подходящие кронштейны см. на страницах продукта.
- Элементы управления (Выключатель или Удаленный или ПЛК)
- Часть управления системы отвечает за переключение полярности цепи двигателя, который управляет направление движения привода.
- Большинство ограничения, условия и требования для автоматизированной системы участвуют в схеме управления.
- Взаимодействие с внешними системами может выполняться с элементами управления разного уровня сложности.
- Источник питания - (Превышение совокупной потребляемой мощности ваших приводов)
- Самая простая из возможных систем – это Проводная система питания и управления CSPS, плюс один исполнительный механизм (с током 5А).

Далее пришло время определить свой самые важные требования. Мы считаем, что большинство проектов относятся к одной из следующих категорий: вертикальный подъем/опускание, горизонтальное скольжение, шарнирные приводы или проект, основанный на точности (пример,выше, платформа Стюарта или научное испытательное оборудование). В этой статье мы не будем рассматривать точность; Если вы разрабатываете прецизионное приложение, мы рекомендуем начать с нашего Учебные пособия по приводам, управляемым Arduino
Приложения с вертикальным подъемом и горизонтальным скольжением проще всего планировать — все параллельно, поэтому не требуется дополнительных расчетов для получения показателей хода и веса — простое сложение и вычитание.
Вертикальные подъемники
Один из многих простой Применение — это подъемник для кухонной техники или опускающийся подъемник — эти проекты настолько распространены, что мы сделали для него практически универсальный комплект привода! Лифты для кухонной техники только способен двигаться по вертикальной линии, опираясь на значительную поддержку телескопической стальной рамы.
Один из многих широко используемый Применением вертикального подъема наших приводов является подъемник Camper Van Bed Lift. Эта операция представляет собой прямое вертикальное движение, обычно распределяемое между 2-4 приводами и требующее равномерного синхронизированного движения.
Оба приведенных выше проекта используют один и тот же принцип, как и пример ниже. Привод перемещает что-то в сторону или в сторону прямым, простым вертикальным движением. Единственный функциональный различия между проектами заключаются в положении привода относительно движущегося объекта — большинство подъемников Bed Lifts оснащены приводами. под объект; большинство подъемников для кухонной техники будут находиться внизу. и позадии другие могут быть даже выше или рядом с движущийся объект. В некоторых конкретных случаях можно использовать шкив. До тех пор, пока ни привод ни движущийся объект заблокировано, а смонтированные соединения прочны, операция будет работать.
В этом примере мы представим, что у нас есть 20-дюймовое проходное окно это надо вытащить вверх и в стороне от использования. Окно весит 25 фунтов, включая раму. Окно на рельсах. Нам нужно иметь более усилие тяги/толкания не менее 25 фунтов и привод(ы) с ходом не менее 20 дюймов.

Привод(ы) в этой операции можно устанавливать вертикально в любой ориентации. На фото выше один блок имеет стержень вверх и один вниз. Красные точки обозначают кронштейны или приспособления, необходимые для движения. Эта операция может использовать два синхронизированный приводы, установленные параллельно, обеспечивают равномерное движение окна. Эта операция могла бы также быть выполнено с помощью одного привода, расположенного над окном и тянущего из центра - окно должно быть достаточно хорошо сбалансировано, чтобы нет завязывать во время работы. Если это вызывает беспокойство, мы рекомендуем использовать рельсовые направляющие, направляющие для выдвижных ящиков или другие линейные направляющие, чтобы обеспечить движение без сковывания.
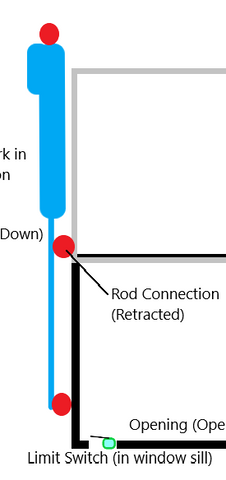
Далее собственно движение. Это окно высотой 20 дюймов. Используя Линейный привод премиум-класса для этого примера; На момент написания у нас есть вариант с ходом 18 дюймов и вариант с ходом 24 дюйма — какой нам выбрать? Ход привода – это максимальное количество движений Вы можете получить от подразделения. Ты можешь всегда дополнительно ограничьте движение с помощью внешних концевых выключателей. Для нашего примера с 20-дюймовым экраном 18-дюймовый привод оставил бы 2 дюйма окна внутри отверстия. 24-дюймовый блок, хотя и длиннее, может быть ограничен 20-дюймовыми, которые нам нужны, без особых усилий. дополнительный рассмотрение. Мы не хотим, чтобы приводы перестали работать после закрытия окна, так как это может повредить окно, чьи-то пальцы, привод или все вышеперечисленное. Мы рекомендуем использовать внешний концевой выключатель, чтобы остановить операцию после завершения желаемого движения. Кликните сюда для получения дополнительной информации об установке и подключении Внешние концевые выключатели.
В примере проекта мы должны использовать внешний концевой выключатель, чтобы остановить привод на закрыто или опущен позиция. Для этого мы бы выровняли положение окна «Втянуто» (Вверх) с полностью втянут положение исполнительного механизма; При этом используется сторона втягивания внутренний концевой выключатель привода для ограничения движения вверх, а внешний концевой выключатель остановит выдвижение (опускание), как только окно коснется подоконника.
Мы должны принять горизонтальный Учитывайте размеры окна. проводка, но на работу это не повлияет.
Горизонтальные слайды
Горизонтальную скользящую операцию можно рассчитать так же, как и вертикальную операцию, но требования к нагрузке изменятся. Обычные горизонтальные операции включают выдвижные ящики или лестницы, скрытые телевизоры, перемещающиеся в сторону, или выдвижные платформы (например, развертываемые солнечные панели).

При автоматизации горизонтального движения первым шагом является создание автоматизируемого движения. В большинстве проектов для этого используются направляющие для ящиков или рельсовые направляющие. В этом приложении слайд на самом деле выдерживает вес груза, поэтому выбор правой линейной направляющей или направляющей имеет первостепенное значение. Сначала вам необходимо установить компоненты линейного слайда и убедиться, что движение работает, нажимая на приложение рукой (если это возможно).

Мы уже установили, что привод в этом приложении делает нет толкать весь вес предмета. Вместо этого приводу необходимо только преодолеть трение на линейных направляющих — в зависимости от того, что вы использовали, это значение может быть очень низким. Если вы не можете самостоятельно получить приблизительную оценку силы при перемещении объекта, вы можете рассчитать совокупное трение/крутящий момент ваших направляющих на основе веса движущегося объекта, а затем убедиться, что привод превышает это значение. Последний вариант – выбрать привод, который мог вертикально поднять объект, что гарантирует, что он будет перемещать объект посредством горизонтального скользящего движения.
Откидные клапаны или крышки
Наш третий распространенный тип проекта — это навесное приложение. На самом деле у нас есть калькулятор помочь с этим - однако эта статья не будет адрес, как использовать калькулятор линейного привода. (Нажмите здесь, чтобы просмотреть обучающую статью по LAC).

Навесное приложение требует некоторых тригонометрических и простых физических расчетов, если оно выполняется с нуля. Как всегда, первым шагом является определение движения и обеспечение того, чтобы движущийся объект мог эффективно поворачиваться вокруг шарнира.

Идеальное применение позволяет приводу толкать движущийся объект по его траектории движения. Траектория движения этого объекта представляет собой дугу, а не прямую линию - это означает, что угол атаки актюатора изменится во время операции, что, в свою очередь, означает, что требуемая моментальная сила также изменится в ходе операции. В таких ситуациях очень важен угол привода относительно движущегося объекта (крышки или створки). Положения крепления будут влиять на этот угол, а также на силу; возможно, ты это понял это приложение имеет 3 переменные что все меняется и влияет на ценность других. Этими переменными являются длина хода привода, положение установки объекта относительно шарнирного соединения и требуемое усилие привода. Рекомендуется сосредоточить внимание на расстояния и ход в первую очередь, затем вычислите требование к весу на эту соответствующую должность.

Когда створка/предмет «закрыта», а привод втянут, точки крепления должны находиться на расстоянии от отверстия до отверстия втянутого привода, а когда створка/предмет «открыты», эти точки крепления должны быть увеличенная длина привода врозь — слишком длинный штрих может быть ограничен правильной длиной, но слишком короткий штрих не приведет к полному перемещению объекта. Калькулятор, упомянутый ранее, разработанный помочь с этими оценками. Нажмите здесь, чтобы просмотреть это руководство.

Если точки крепления ближе к шарниру, операция потребует Более высокая сила, более короткий ход привода. Если ваши точки крепления находятся дальше от петли, вы сможете использовать меньшая сила привод с большая длина хода. Для навесных проектов существует практически всегда диапазон функциональных возможностей привода, и вам решать какой из вариантов лучше всего подойдет вашему проекту.
Возможно, вы поняли, что мы определяем две точки на плоскости, которые при развертывании образуют треугольник — это тригонометрия, которую можно использовать для расчета длины штриха с нуля. Это рассуждение может также определить две возможные точки крепления, в этой ситуации подойдет любое местоположение, но у них всегда будет разные значения нагрузки. Пример того, как это выглядит, приведен ниже.
Монтажное положение 1: Эта операция будет иметь меньший вес нагрузки, так как монтажные позиции ближе к перпендикуляру когда объект находится в горизонтальном положении, то есть когда есть большая нагрузка на актуаторе. Механическое преимущество выше в этой конструкции..

Монтажное положение 2: Данная планировка потребует привод с большей силой; это потому, что привод расположен под углом к шарнир. Это требует большей силы, необходимой для начать двигаться объект.




