Управление скоростью линейного привода

Линейные приводы играют решающую роль в операциях в различных секторах, включая здравоохранение, производство, сельское хозяйство, автомобилестроение и другие; следовательно, необходима большая точность и аккуратность. Регуляторы скорости линейных приводов предлагают оптимальные механизмы управления для регулирования движения с желаемыми скоростями в соответствии с требованиями применения.
Основными функциями регуляторов скорости линейного привода являются регулирование входного напряжения, подаваемого на электродвигатель или привод, при этом обеспечивая требования к нагрузке при максимальной выходной мощности, обеспечивая тем самым большую эффективность в динамических системах.
Управление скоростью линейного привода требует сложных механизмов, таких как реализация контура управления скоростью, который включает в себя контуры обратной связи, получаемые от встроенных датчиков, которые обнаруживают изменения положения или скорости — это помогает получить оптимальные результаты посредством калибровки. FIRGELLIПлата управления приводом имеет собственный встроенный контур обратной связи по управлению скоростью, который устанавливает оптимальные условия для работы, обеспечивая при этом точные движения для улучшения вашей системы.

FIRGELLIПлата управления приводом имеет собственную встроенную петлю обратной связи для управления скоростью, если вам нужна система с обратной связью с обратной связью для очень точного управления скоростью. Этот блок управления можно использовать только с линейными приводами, имеющими встроенные датчики обратной связи, такие как датчик Холла или оптический датчик, поскольку эти датчики необходимы для измерения скорости привода.
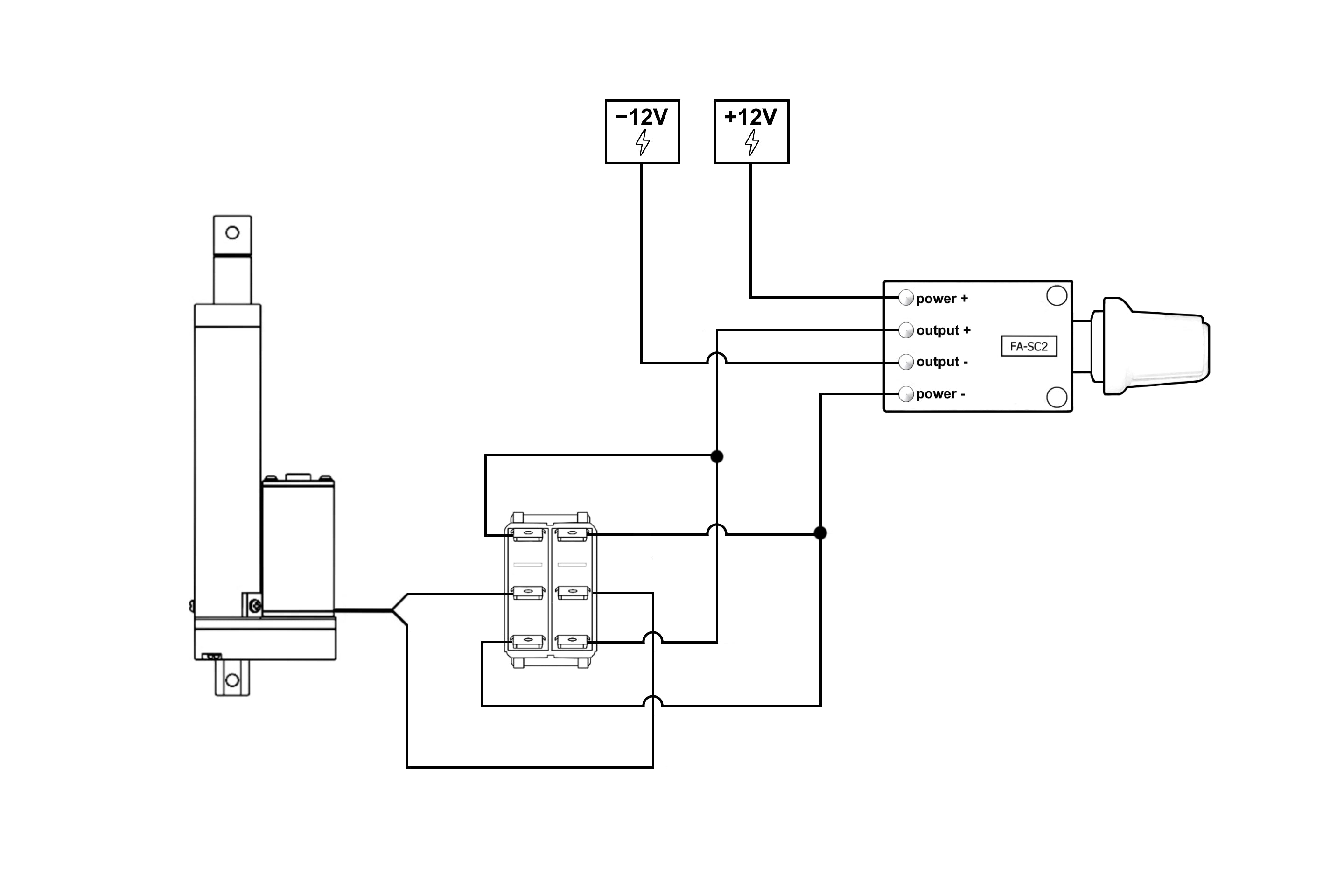
Чтобы обеспечить точность и избежать ошибок, линейные приводы, управляемые регуляторами скорости, постоянно контролируют и переоценивают свои скорости. На следующей схеме подключения показано, как подключить линейный привод к кулисному переключателю и регулятору скорости для обеспечения оптимальной производительности и управления.
Схема подключения регулятора скорости и привода
ПРЯМОЕ УПРАВЛЕНИЕ
В контексте линейных приводов и управления скоростью упреждающее управление является важнейшей концепцией. Этот подход основан на предположении, что пользователь, являясь контроллером, может точно спрогнозировать выходные данные регулятора скорости и внести необходимые корректировки соответствующим образом. Основная цель контура управления для регулирования скорости — оптимизировать скорость привода в соответствии с требованиями конкретной задачи. При условии, что все переменные остаются постоянными, упреждающее управление позволяет пользователям делать обоснованные прогнозы относительно взаимосвязи между рабочим циклом привода и его скоростью на основе значений датчика в секунду.
Рассчитывая рабочий цикл, пользователи могут точно достичь желаемой скорости, сводя к минимуму ошибки в оценке. Этот подход снижает риск промаха и полного пропуска цели или преждевременной остановки до достижения цели, тем самым подрывая фундаментальную цель использования линейного привода.
Как регулятор скорости постоянного тока управляет скоростью привода
Регулятор скорости постоянного тока, использующий широтно-импульсную модуляцию (ШИМ), представляет собой сложное электронное устройство, предназначенное для регулирования скорости двигателя. привод постоянного тока. ШИМ — это метод, который позволяет контролировать среднее напряжение, подаваемое на двигатель постоянного тока, путем быстрого включения и выключения питания с постоянной частотой. Скорость привода постоянного тока можно модулировать, регулируя время включения (рабочий цикл) относительно времени выключения в пределах каждого цикла.
Вот обзор того, как контроллер скорости постоянного тока, использующий ШИМ, управляет скоростью привода постоянного тока:
- Частота: ШИМ-контроллер генерирует прямоугольный сигнал постоянной частоты, который состоит из чередующихся периодов включения и выключения. Эта частота обычно достаточно высока, чтобы двигатель привода не воспринимал действие переключения, что приводит к плавному регулированию скорости.
- Рабочий цикл: рабочий цикл относится к проценту времени, в течение которого сигнал остается во включенном состоянии в течение одного цикла. Изменяя рабочий цикл, можно контролировать среднее напряжение, подаваемое на двигатель привода. Более высокий рабочий цикл соответствует более высокому среднему напряжению, что приводит к более высокой скорости привода, тогда как более низкий рабочий цикл приводит к более низкому среднему напряжению и, следовательно, к более медленной скорости привода.
- Модуляция: Когда пользователь или автоматизированная система регулирует желаемую скорость привода постоянного тока, ШИМ-контроллер соответствующим образом изменяет рабочий цикл. Это гарантирует, что на привод подается соответствующее среднее напряжение, что позволяет точно контролировать его скорость.
- Эффективность: поскольку ШИМ-регулятор скорости быстро переключается между состояниями «полностью включено» и «полностью выключено», потери энергии в виде тепла сводятся к минимуму. Это делает ШИМ высокоэффективным методом управления скоростью привода постоянного тока.
Таким образом, контроллер скорости постоянного тока, использующий ШИМ, работает, генерируя прямоугольный сигнал с постоянной частотой и изменяющимся рабочим циклом. Регулируя рабочий цикл, контроллер модулирует среднее напряжение, подаваемое на двигатель привода постоянного тока, позволяя точно контролировать его скорость, сохраняя при этом высокую энергоэффективность.
Почему вы хотите использовать контроллер скорости?
-
Прецизионный контроль: Основным преимуществом регулятора скорости является его способность точно контролировать скорость привода. Эта функция позволяет пользователям точно настраивать скорость привода, обеспечивая его оптимальную работу для конкретной задачи или применения. Достигнув желаемой скорости и точности, вы можете повысить общую производительность и эффективность системы.
-
Адаптивность: Различные приложения часто требуют различных требований к скорости или требуют корректировки во время работы. FIRGELLI Контроллер скорости предоставляет вам возможность легко изменять и адаптировать скорость привода для удовлетворения уникальных требований каждого приложения. Такая адаптивность позволяет инженерам оптимизировать производительность системы в различных сценариях.
-
Гладкая операция: Регуляторы скорости, особенно те, которые используют технологию широтно-импульсной модуляции (ШИМ), которую используют большинство подходящих регуляторов скорости, предлагают преимущество, заключающееся в обеспечении плавного и последовательного управления скоростью привода. Эта плавная работа имеет решающее значение, поскольку она сводит к минимуму механическое напряжение и износ привода, тем самым продлевая срок его службы.
-
Синхронизация: в некоторых приложениях требуется синхронизированное движение нескольких приводов. В таких случаях регуляторы скорости играют ключевую роль в поддержании постоянной скорости всех задействованных приводов. Такая синхронизация обеспечивает точную координацию и слаженную работу, что приводит к оптимизации производительности и функциональности системы в целом.
Какой высокий звук вы слышите из регулятора скорости, когда вы снижаете и снижаете скорость?
Высокий звук, который вы слышите из регулятора скорости при понижении и понижении скорости, обычно вызван частотой переключения метода широтно-импульсной модуляции (ШИМ), используемого для регулирования скорости привода.
ШИМ предполагает быстрое включение и выключение источника питания двигателя с постоянной частотой. Когда скорость снижается, рабочий цикл (процент времени, в течение которого сигнал находится во включенном состоянии) уменьшается, в результате чего двигатель получает меньшее среднее напряжение. В некоторых случаях частота ШИМ или ее гармоники могут находиться в пределах слышимого человеческим слухом диапазона (от 20 Гц до 20 кГц).
Звук может генерироваться из-за вибрации катушек двигателя или других компонентов регулятора скорости, которые резонируют на частоте ШИМ или ее гармониках. Эта вибрация вызвана быстрым расширением и сжатием магнитного поля, создаваемого электрическим током в катушках двигателя, когда они переключаются между состояниями ВКЛ и ВЫКЛ.
При понижении скорости рабочий цикл уменьшается, и двигатель получает меньшую мощность во время каждого цикла переключения. Такое изменение мощности может привести к тому, что слышимый шум станет более выраженным. Кроме того, определенные резонансные частоты системы могут быть более чувствительны к созданию звукового шума, в зависимости от механических и электрических характеристик двигателя и регулятора скорости.




