Использование обратной связи для обеспечения точных движений является ключевым моментом в любом проекте автоматизации, от роботов до телевизионных лифтов. Правильная реализация обратной связи позволяет точно управлять вашими действиями в замкнутом контуре. линейный привод; Вам больше не нужно вручную проверять, находится ли линейный привод в правильном положении. Поскольку линейные приводы обычно используются для перемещения объекта из одного положения в другое, наиболее важной обратной связью, которую можно получить от вашего привода, является его положение. Линейные приводы с обратной связью по положению обычно измеряют положение с помощью одного из трех различных датчиков; потенциометры, датчики Холла и оптические датчики.
Потенциометры
Потенциометры представляют собой переменные резисторы, сопротивление которых при использовании в линейных приводах меняется в зависимости от положения привода. Потенциометры будут состоять из трех контактов, как показано ниже: контакт 1 — это входное напряжение, контакт 3 — заземление и контакт 2 — регулируемый резистор. Вы можете прочитать выходные данные потенциометров, измерив напряжение между контактом 2 и землей, которое будет меняться по мере движения привода. Чтобы эффективно внедрить эту обратную связь, вам нужно будет использовать какой-либо тип контроллера, например Ардуино, чтобы считать это значение положения при движении привода.

Одной из самых сильных сторон потенциометра является то, что он обеспечивает индикацию абсолютного положения линейного привода. По этой причине эту обратную связь можно довольно легко обработать в программном обеспечении контроллера, поскольку вы можете просто сравнить текущие выходные показания с выходными показаниями желаемого положения. Вам также никогда не придется беспокоиться о потере положения привода, если вы выключите систему, поскольку сопротивление потенциометра будет одинаковым независимо от того, включено оно или нет.

Есть несколько недостатков использования потенциометров для позиционной обратной связи. Одним из недостатков является то, что на обратную связь от потенциометра могут влиять электрические шумы, и для достижения стабильных результатов может потребоваться фильтрация сигнала. Выходной сигнал потенциометра также зависит от входного напряжения на потенциометре, что может затруднить обеспечение одновременного движения нескольких линейных приводов, поскольку выходной сигнал может незначительно меняться из-за небольших изменений входного напряжения. Кроме того, потенциометры, как правило, не так чувствительны к меньшим перемещениям линейного привода по сравнению с другими вариантами обратной связи, что затрудняет получение повторяемых результатов.
Датчик Холла
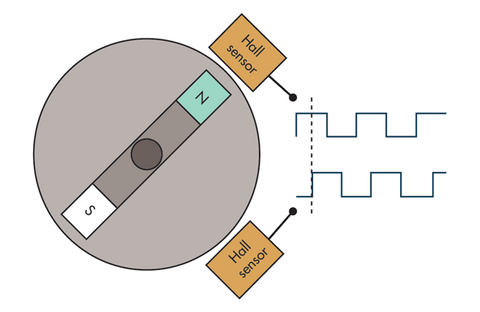
Датчики Холла Работа основана на эффекте Холла, который представляет собой воздействие магнитного поля на создание напряжения. Датчики Холла могут обеспечивать цифровой или линейный выходной сигнал, но для линейных приводов обычно используются датчики Холла с цифровым выходом. Когда эти датчики обнаруживают магнитное поле, они создают напряжение, которое может считываться контроллером [1]. В линейных приводах эти датчики расположены внутри редуктора привода вместе с магнитным диском. Когда линейный привод движется, этот магнитный диск вращается, проходя мимо датчика Холла, который генерирует импульс напряжения. Эти импульсы можно использовать для определения насколько далеко переместился привод. Как правило, линейные приводы, в которых используются датчики Холла для обеспечения обратной связи по положению, определяют количество импульсов на пройденный дюйм, которое вы можете использовать для определения расстояния перемещения привода. Например, если вы обнаружили 6000 импульсов, а количество импульсов на дюйм вашего привода составляет 12000, это означает, что ваш привод сдвинулся на 0,5 дюйма.
Основным недостатком использования датчика Холла для обратной связи по положению по сравнению с потенциометром является то, что датчики Холла не измеряют абсолютное положение. Вместо этого они производят импульсы, которые можно подсчитать, чтобы определить, насколько далеко переместился привод, что требует от вас знать, где привод начинает определять абсолютное положение. Это можно преодолеть с помощью программного обеспечения вашего контроллера, например, в Arduino, сохраняя текущее положение привода и всегда запуская привод из известного положения, например, полностью втянутого. Это может потребовать от вас перевода привода в это известное положение каждый раз при включении системы.
Преимущество использования датчика Холла для обратной связи по положению заключается в том, что он обеспечивает гораздо большее разрешение по сравнению с обратной связью от потенциометра. Поскольку на дюйм перемещения может приходиться 1000 импульсов, датчики Холла обеспечивают точность и надежность позиционирования линейного привода. Частота импульсов также будет различаться в зависимости от скорости вашего линейного привода, что означает, что вы можете использовать их для измерения скорости вашего линейного привода. Датчики Холла также обеспечивают большую способность обеспечивать одновременное движение нескольких линейных приводов, поскольку подсчет импульсов более точен, чем изменение напряжения потенциометра. Используя наш Контроллер актуатора FA-SYNC-X, вы даже можете обеспечить синхронное перемещение приводов независимо от нагрузки.
Оптический датчик
Оптические датчики которые используются в линейных приводах (существуют и другие типы оптических датчиков), действуют очень похоже на датчики Холла, за исключением того, что они обнаруживают свет с помощью фотодетектора [2]. Оптические датчики работают, пропуская свет от светодиода или другого источника света через диск кодера. Этот диск кодера имеет прорези, позволяющие свету периодически проходить через него. На другой стороне диска находится фотодетектор, который улавливает свет, когда он проходит через щели диска, и создает выходной сигнал [3]. Когда привод движется, диск энкодера вращается, и свет обнаруживается фотодетектором, который генерирует импульс напряжения. Эти импульсы можно использовать аналогично импульсам датчика Холла для определения насколько далеко переместился привод. Линейные приводы, использующие оптические датчики для обратной связи по положению, также определяют количество импульсов на пройденный дюйм, которое можно использовать для определения расстояния перемещения привода.

Оптические датчики, опять же, имеют те же преимущества и недостатки, что и датчики Холла по сравнению с потенциометрами. Они имеют большую точность и разрешение, даже больше, чем датчики Холла, и могут использоваться для измерения скорости линейного привода. Они также лучше обеспечивают одновременное движение нескольких линейных приводов и могут использовать Контроллер актуатора FA-SYNC-X. Они также не измеряют абсолютное положение и вместо этого требуют подсчета импульсов, чтобы определить, насколько далеко переместился привод. Вам также необходимо будет начать с известной позиции, поскольку вам нужно будет сохранить текущую позицию в программном обеспечении, чтобы отслеживать абсолютное положение.
Краткое содержание
Ваш выбор типа обратной связи, которую вы хотите получить от своего линейный привод будет зависеть от того, что вы считаете более важным для вашего приложения. Вам нужен высокий уровень точности? Выберите линейный привод с оптическим датчиком или датчиком Холла. Разве вы не хотите устанавливать привод в исходное положение каждый раз, когда вы его включаете? Тогда используйте линейный привод с потенциометром. Хотите одновременно управлять несколькими линейными приводами? Выберите линейный привод с оптическим датчиком или датчиком Холла. Хотите, чтобы ваш отзыв отражал абсолютную позицию? Используйте линейный привод с потенциометром.
[1] Монари, Г. (июнь 2013 г.) Понимание разрешения оптических и магнитных энкодеров. Извлекаются из: https://www.electronicdesign.com/technologies/components/article/21798142/understanding-resolution-in-optical-and-magnetic-encoders
[2] Пашотта, Р. Статья об оптических датчиках. Извлекаются из:https://www.rp-photonics.com/optical_sensors.html



