



Atuadores lineares da haste de feedback










Atuadores lineares da haste de feedback
- Descrição
- Especificações
- Desenhos técnicos
- Placa de controle
- Gráfico de desempenho
- Vídeo de produtos
- Vídeo de comparação
- Downloads de modelo 3D (.STEP)
- Diagrama de fiação
- Tutorial
- Downloads
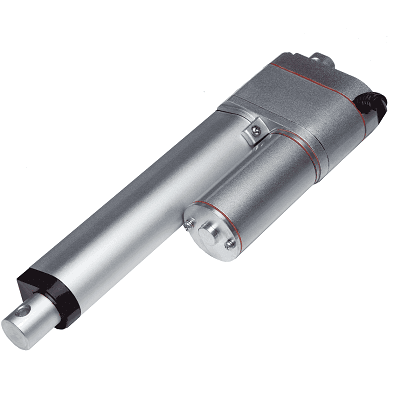
Descrição
Esses atuadores estão equipados com potenciômetros de Bourns embutidos para que você possa determinar a posição absoluta da haste do atuador a qualquer momento.
Para conectar os atuadores de feedback a um dispositivo de leitura de feedback, recomendamos o uso de uma placa Arduino. Clique aqui Para obter mais informações sobre como usar um conselho do Arduino com nossos atuadores.
O feedback do potenciômetro é executado em um sistema de 3 fios de 10k ohm. O motor do atuador linear é controlado por um sistema de dois fios em que a reversão da polaridade retrairá o atuador; Esse sistema é facilmente conectado a placas de circuito para controle inteligente, bem como relés, interruptores e muito mais. A linha do atuador da haste de feedback usa o Suportes de montagem MB1 e/ou o Suportes MB6. O Suporte de extremidade da haste MB10 também se encaixará nesta unidade.
Modelos CAD deste atuador podem ser encontrados em Recursos/arquivos 3D. Para mais informações, revise as especificações e os desenhos técnicos abaixo ou visite nosso Página de tutoriais Para obter instruções sobre como usar este atuador com interruptores, controles remotos, controladores de velocidade e arduino.
Recursos e benefícios padrão
- Equipado com potenciômetros de 10 turnos embutidos com resistência de 10k ohm
- Equipado com interruptor de limite interno
- Limites fixo de extremidade de derrame embutidos (não móveis). Para atuadores lineares de comutação de limite ajustáveis, tente nosso novo Atuadores de comutação limitados ajustáveis
- Disponível em 3 forças dinâmicas. 35 lbs., 150 lbs. e 200 libras.
- Materiais de alta qualidade: Tubo interno e externo de alumínio combinado com alojamento de liga de zinco para maior resistência à corrosão, resultando em longa vida útil do serviço
- Ponto de montagem da Clevis em cada extremidade para garantir uma instalação fácil
- Compatível com o Suportes de montagem MB1 e/ou o Suportes MB6 e com Suporte final da haste MB10
- Integrar -se ao dispositivo de leitura de feedback, como a placa Arduino, para definir limites posicionais predefinidos.
Especificações
Modelo FA-PO-35-12-XX FA-PO-150-12-XX FA-PO-240-12-XX Força dinâmica 35 lbs. 150 lbs. 200 lbs. Força estática 70 lbs. 300 lbs. 400 lbs. Velocidade ("/s) 2 0.5 0.3 Razão da transmissão 5:1 20:1 30:1 Ciclo de serviço 20% Classificação IP 54 Parafuso Parafuso acme Diâmetro da linha 12mm Clevis termina 6,3 mm de diâmetro Entrada 12V DC Max Draw 5 a Temperatura operacional 0 ° C - 40 ° C. Interruptor de limite Embutido (predefinição de fábrica) - Para atuadores lineares de comutação de limite ajustáveis, tente nosso novo Atuadores de comutação limitados ajustáveis Certificações de segurança CE, Rohs Suporte (s) MB1 e/ou MB6; MB10 Opinião Linearidade de potenciômetro de 10 mil ohm de 3 fios +/- 0,25% 10 potenciômetro de giro; Classificação de potência 1-1.5W Capacidade síncrona Sim, com um microcontrolador. Não é compatível com nossos FCBs Comprimento do fio 23" Tamanho do fio 18awg AVC Comprimento retraído Comprimento estendido Peso Arquivo de etapa 2" 7.9" 9.9" 2,7 lbs Fa-po- (f) -12-2 3" 8.9" 11.9" 2,8 lbs Fa-po- (f) -12-3 4" 9.9" 13.9" 2,9 lbs Fa-po- (f) -12-4 6" 11.9" 17.9" 3,1 lbs FA-PO- (F) -12-6 8" 13.9" 21.9" 3,4 lbs Fa-po- (f) -12-8 12" 17.9" 29.9" 3,85 lbs FA-PO- (F) -12-12 Desenhos técnicos
 ×
×Placa de controle
Todos os atuadores de feedback são compatíveis com a placa de controle do Atuonix Linear Atuator, também conhecida como placa LAC. Mais informações podem ser encontradas seguindo este link. bem como umConselho de Arduino.


Gráfico de desempenho


Vídeo de produtos
Revisão do atuador linear de feedback

Vídeo de comparação
Feedback vs atuador linear clássico

Downloads de modelo 3D (.STEP)
Força de 35 lb, 150 lb e 200lb
Diagrama de fiação
Clique aqui para ver nosso gerador de diagrama de fiação para ajudá -lo a configurar seu sistema de atuadores
Tutorial
Clique aqui para ver nosso tutorial sobre como configurar um Arduino com nossos atuadores de feedback.
Downloads
Compatible Brackets



Frequently Bought Together

- MB1 Bracket$7.60 USD
- MB6 Body Bracket$9.75 USD
- MB10 Bracket for Rod end actuators$17.85 USD
- Momentary Toggle Switch for Actuators$12.00 USD
