새로운 자동화 프로젝트는 어려울 수 있습니다. 우린 알아. 모든 기술적 인 용어, 전기 배선, 컴퓨터 제어 인터페이스 및 기타 종과 휘파람을 사용하면 어디에 있어야하는지 알기가 어려울 수 있습니다.시작! 불확실성이 프로젝트가 진행되는 것을 막을 때, 기본으로 돌아가고 프로젝트의 요구 사항을 검토하면 경로를 보여줄 수 있습니다. 나는 지식이 힘이라고 말하고 싶지만이해 통화입니다.
새로운 자동화 프로젝트를 시작하거나 선형 액추에이터를 기존 프로젝트로 개조 및 교체 할 때 이러한 질문을 통해 프로젝트에 어떤 액추에이터가 작동하는지 결정하는 데 도움이됩니다.
- 응용 프로그램은 무엇입니까?
- 액추에이터를 기존 디자인이나 제품에 넣고 있습니까?
- 처음부터 새로운 프로젝트를 설계하고 있습니까?
- 장치의 부하는 얼마입니까, 아니면 얼마나 많은 힘이 필요합니까?*
- 액추에이터 중량 등급 축 방향 하중. 비선형 애플리케이션 (힌지와 같은)의 경우 축 하중을 계산해야 할 수도 있습니다.
- 얼마나 많은 스트로크 ( '여행')가 필요합니까?
- 필요한 움직임 속도?
- 액추에이터 운동 속도와 힘 등급은 반비례합니다. 응용 프로그램에 따라 원하는 속도 또는 원하는 힘 중에서 선택해야 할 수도 있습니다.
- 작동하려면 얼마나 자주 필요합니까?
- 우리는 5 분에 듀티 사이클을 계산합니다 연속 사용 (~에 운동); 대부분의 비 산업 응용 프로그램은 듀티 사이클을 고려할 필요가 없습니다.
- 다른 조건?
- 충돌 속도, 완화 속도 또는 가변 속도 제어와 같은 기능은 추가 구성 요소에 포함될 수 있습니다.
- 다른 기능은 때때로 릴레이, 제어 체계 및 창의적 배선으로 수행 될 수 있습니다.
위의 모든 기준이 이해되면 구성 요소에서 시스템을 구성 할 준비가되었습니다. 기본 액추에이터 시스템에는 이러한 부분이 필요합니다.
- 액추에이터 & 장착 브래킷 - 브래킷은 액추에이터에 따라 다릅니다. 적절한 괄호는 제품 페이지를 참조하십시오
- 통제 수단 (스위치 또는 원격 또는 plc)
- 시스템의 제어 부분이 담당합니다 극성 전환 모터 회로의 액추에이터 운동의 방향.
- 최대 제한, 조건 및 요구 사항 자동화 된 시스템의 경우 제어 체계에 관여합니다.
- 외부 시스템과 인터페이스 다양한 수준의 합병증에서 제어 성분으로 수행 할 수 있습니다.
- 전원 - (액추에이터의 누적 암페어 추첨을 초과)
- 가장 쉬운 시스템은 다음과 같습니다 CSP 유선 전원 및 제어 시스템, 더하기 하나 액추에이터 (5A 드로우 포함).

다음으로, 당신을 결정할 때입니다 가장 중요한 요구 사항. 우리는 대부분의 프로젝트가 수직 리프팅/하강, 수평 슬라이딩 모션, 힌지 액션 또는 정밀 기반 프로젝트 (예 :위에, 스튜어트 플랫폼 또는 과학 테스트 장비). 우리는이 기사에서 정밀도를 다루지 않을 것입니다. 정밀 응용 프로그램을 설계하는 경우 Arduino 대조 액추에이터 튜토리얼
수직 리프팅 및 수평 슬라이드 애플리케이션은 계획하기가 가장 간단합니다. 모든 것이 평행하므로 뇌졸중과 무게 등급을 얻는 추가 계산이 없습니다.
수직 리프트
가장 중 하나입니다 똑바로 응용 프로그램은 주방 기기 리프트 또는 드롭 다운 리프트입니다.이 프로젝트는 거의 올인원 액추에이터 키트를 만들 정도로 일반적입니다! 주방 어플라이언스 리프트는입니다 오직 텔레스코픽 스틸 프레임에서 실질적인지지를 받아 수직선으로 움직일 수 있습니다.
가장 중 하나입니다 광대하게 사용 된 액추에이터의 수직 리프팅 응용 프로그램은 Camper Van Bed Lift입니다. 이 작업은 직접적인 수직 운동이며, 일반적으로 2-4 액추에이터에 걸쳐 퍼져 있으며 동기화 된 동기조차가 필요합니다.
위의 두 프로젝트 모두 아래의 예와 같은 원칙을 사용합니다. 액추에이터는 직선적이고 단순한 수직 운동으로 무언가를 또는 방향으로 움직이고 있습니다. 유일한 기능의 프로젝트 간의 차이는 움직이는 물체에 대한 액추에이터 위치입니다. 대부분의 침대 리프트에는 액추에이터가 있습니다. 아래에 그 물체; 대부분의 주방 기기 리프트는 아래에 있습니다 그리고 뒤에그리고 다른 사람들도 그럴 수도 있습니다 위 또는 인접 움직이는 물체. 일부 특정 응용 분야에서는 풀리를 사용할 수 있습니다. 어느 쪽이든 액추에이터 ...도 아니다 움직이는 물체 방해가되고 장착 된 연결이 견고하여 작동이 작동합니다.
이 예에서는 a가있는 척합니다 20 인치 패스 스루 창 그것은 당겨야합니다 위로 그리고 사용하기위한 길을 벗어납니다. 창은 프레임을 포함하여 25 파운드입니다. 창은 트랙에 있습니다. 우리는 필요합니다 더 25 파운드의 푸시/풀 및 최소 20 인치 스트로크 액추에이터.

이 작업의 액추에이터는 어느 방향 중 어느 쪽이든 수직으로 장착 될 수 있습니다. 위의 사진에는 한 장치에 막대가 있습니다. 위로 그리고 하나 아래에. 빨간색 점은 움직임에 필요한 괄호 또는 부착물을 나타냅니다. 이 작업은 두 가지를 사용할 수 있습니다 동기화 액추에이터는 창의를 보장하고 동작하기 위해 평행하게 장착했습니다. 이 작업은 할 수 있습니다 또한 창 위의 단일 액추에이터에 의해 수행되어 중앙에서 당겨서 창은 충분히 균형을 잡아야합니다. ~ 아니다 작동 중에 바인딩. 문제가있는 경우, 레일 슬라이드, 서랍 슬라이드 또는 기타 선형 안내서를 사용하여 결합되지 않은 움직임을 보장하는 것이 좋습니다.
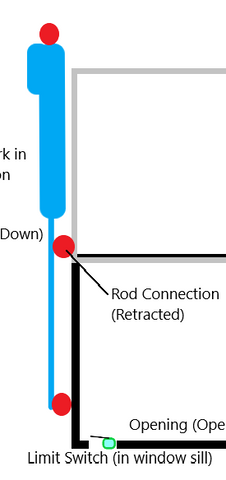
다음으로, 실제 움직임. 이 창은 키가 20 인치입니다. 사용 a 프리미엄 선형 액추에이터 이 예를 위해; 글을 쓰는 시점에서 18 인치 스트로크 옵션과 24 인치 스트로크 옵션이 있습니다. 어느 것을 선택해야합니까? 액추에이터의 스트로크는입니다 최대 동작량 당신은 장치에서 얻을 수 있습니다. 당신은 할 수 있습니다 언제나 외부 한계 스위치로 모션을 더 제한하십시오. 우리의 20 인치 예를 위해, 18” 액추에이터 창의 2 인치를 남길 것입니다 개구부 내부. 24 인치 단위는 더 길지만 20 인치로 제한 될 수 있습니다. 추가의 고려 사항. 창문이 닫힌 후 액추에이터가 죽은 드라이브를 원하지 않습니다. 창, 누군가의 손가락, 액추에이터 또는 위의 모든 것을 다칠 수 있기 때문입니다. 원하는 동작이 완료되면 외부 한계 스위치를 사용하여 작동을 중지하는 것이 좋습니다. 여기를 클릭하십시오 설치 및 배선에 대한 자세한 내용은 외부 한계 스위치.
예제 프로젝트에서는 외부 한계 스위치를 사용하여 액추에이터를 중지해야합니다. 닫은 또는 낮아졌습니다 위치. 이를 위해, 우리는 창의 후퇴 (위) 위치를 완전히 철회되었습니다 액추에이터의 위치; 이것은 사용합니다 후퇴 측 동작을 제한하기 위해 액추에이터의 내부 한계 스위치 위로 향하여, 그리고 외부 한계 스위치는 창이 실로 접촉하자마자 확장 (하강)을 중지합니다.
우리는 가져 가야합니다 수평의 창의 차원을 고려합니다 배선, 그러나 그것은 작업에 영향을 미치지 않을 것입니다.
수평 슬라이드
수평, 슬라이딩 작업은 수직 작동과 거의 같은 방식으로 계산 될 수 있지만 부하 요구 사항이 변경됩니다. 일반적인 수평 작업에는 슬라이드 아웃 서랍 또는 계단, 측면으로 이동하는 숨겨진 TV 또는 확장 플랫폼 (예 : 배포 가능한 태양 전지판)이 포함됩니다.

수평 동작을 자동화 할 때 첫 번째 단계는 자동화 할 모션을 만드는 것입니다. 대부분의 프로젝트는이를 위해 서랍 슬라이드 또는 레일 슬라이드를 사용합니다. 이 응용 프로그램에서는 슬라이드입니다 실제로 하중 무게를 지정하므로 올바른 선형 가이드 또는 슬라이드를 선택하는 것이 가장 중요합니다. 선형 슬라이드 구성 요소를 먼저 설치하고 가능하면 (가능한 경우) 애플리케이션을 푸시하여 모션이 작동하도록합니다.

우리는 이미이 응용 프로그램의 액추에이터가 ~ 아니다 물체의 전체 무게를 밀어 넣으십시오. 대신, 액추에이터는 만 극복하면됩니다 마찰 선형 가이드에서 - 사용한 내용에 따라이 값은 매우 낮을 수 있습니다. 물체를 직접 움직일 때 대략적인 힘을 얻을 수 없다면, 움직이는 물체의 무게에 따라 슬라이드의 누적 마찰/토크를 계산할 수 있다면 액추에이터가 그 값을 초과하도록하십시오. 마지막 옵션은 액추에이터를 선택하는 것입니다 ~할 수 있었다 수직으로 들어 올립니다 객체는 수평 슬라이딩 모션을 통해 물체를 움직일 것을 보장합니다.
힌지 플랩 또는 뚜껑
우리의 세 번째 공통 프로젝트 유형은 힌지 된 응용 프로그램입니다. 우리는 실제로 A가 있습니다 계산자 그러나 이것을 돕기 위해 이 기사는 그렇지 않을 것입니다 선형 액추에이터 계산기를 사용하는 방법을 해결하십시오. (LAC 튜토리얼 기사를 보려면 여기를 클릭하십시오).

힌지 된 응용 프로그램에는 처음부터 완료되면 일부 삼각법 및 간단한 물리 계산이 필요합니다. 항상 그렇듯이 첫 번째 단계는 움직임을 정의하고 움직이는 물체가 힌지 주위를 효과적으로 표현할 수 있도록하는 것입니다.

이상적인 응용 프로그램을 사용하면 액추에이터가 움직이는 물체를 동작 경로를 따라 밀어 넣을 수 있습니다. 이 물체의 움직임 경로는 직선이 아닌 아크입니다. 이것은 액추에이터의 공격 각도를 의미합니다. 바뀔 것이다 수술 중에 - 결국 순간적인 필요한 힘 작업을 통해서도 변경됩니다. 이러한 상황에서는 움직이는 물체 (뚜껑 또는 플랩)에 대한 액추에이터의 각도가 매우 중요합니다. 장착 위치는이 각도와 힘에 영향을 미칩니다. 당신은 그것을 깨달았을 것입니다 이 신청서 가지다 3 변수 그 모든 것이 변화하고 다른 사람들의 가치에 영향을 미칩니다. 이 변수는 힌지 조인트에 대한 액추에이터 스트로크 길이, 객체 장착 위치 및 필요한 액추에이터 힘입니다. 에 중점을 두는 것이 좋습니다 먼저 거리와 스트로크, 다음을 계산합니다 체중 요구 사항 각각의 위치를 위해.

플랩/객체가 '닫히고 액추에이터가 철회되면 장착 지점은 후퇴 액추에이터의 구멍-구멍 길이가되어야하며 플랩/객체가'열리면 '이 장착 지점이 확장 액추에이터 길이 별도로 - 너무 길은 스트로크는 올바른 길이로 제한 될 수 있지만 너무 짧은 스트로크는 물체를 완전히 움직이지 않습니다. 앞에서 언급 한 계산기는 설계 이러한 추정에 도움이됩니다. 해당 자습서를 보려면 여기를 클릭하십시오.

장착 지점이있는 경우 힌지에 더 가깝습니다, 작업에는 a가 필요합니다 더 높은 힘, 짧은 스트로크 액추에이터. 마운팅 포인트가 힌지에서 추가로 사용되면 낮은 힘 a 더 긴 스트로크 길이. 힌지 프로젝트의 경우 거의 없습니다 항상 범위 기능적 액추에이터 가능성의 경우, 결정하는 것은 당신에게 달려 있습니다. 옵션 중 어느 것입니다 프로젝트에 가장 적합합니다.
배치시 삼각형을 만드는 평면에서 두 점을 정의하고 있음을 깨달았을 것입니다. 이것은 뇌졸중 길이를 처음부터 계산하는 데 사용할 수있는 삼각법입니다. 이러한 추론도 정의 할 수 있습니다 가능한 두 가지 장착 지점,이 상황에서는 어느 곳에서나 작동하지만 항상 다른 하중 값. 이것이 어떻게 보이는지의 예는 다음과 같습니다.
장착 위치 1 : 이 작업에는 a가 있습니다 낮은 부하 중량장착 위치와 같이 수직에 더 가깝습니다 물체가 수평 위치에있을 때 대부분의 부하 액추에이터에. 이 디자인에서는 기계적 이점이 더 높습니다.

장착 위치 2 : 이 레이아웃에는 a가 필요합니다 더 높은 힘 액추에이터; 액추에이터가 기울어 져 있기 때문입니다 ...쪽으로 힌지. 이것은 더 많은 힘이 필요합니다 움직이기 시작합니다 그 물체.




