線形アクチュエータ速度制御

線形アクチュエーターは、とりわけ、医療、製造、農業、自動車など、さまざまなセクター内の運用において重要な役割を果たします。したがって、より高い精度と精度の必要性が不可欠です。線形アクチュエータ速度コントローラーは、アプリケーション要件に従って、目的の速度で動きを調節するための最適な制御メカニズムを提供します。
線形アクチュエータ速度コントローラーの主な機能は、電気モーターまたはアクチュエーターに供給される電圧入力を調整しながら、最大の力出力容量で負荷要件に対応します。したがって、動的システム内での効率が向上します。
線形アクチュエータ速度を制御するには、位置または速度の変化を検出する埋め込みセンサーから得られたフィードバックループを含む速度制御ループの実装など、洗練されたメカニズムが必要です。これは、カリブレーションを通じて最適な結果を生成するのに役立ちます。 FIRGELLIActuator Control Boardは、システムの進歩のための正確な動きを確保しながら、動作に最適な条件を確立する独自の組み込み速度制御フィードバックループを備えています。

FIRGELLI速度を非常に正確に制御するためのフィードバッククローズドループシステムが必要な場合、Actuator Control Boardには独自の組み込み速度制御フィードバックループがあります。このコントロールボックスは、アキュアの速度を測定するためにこれらのセンサーが必要なため、ホールセンロまたは光学センサーとしてソッチを組み込んだ線形アクチュエーターで使用できます。
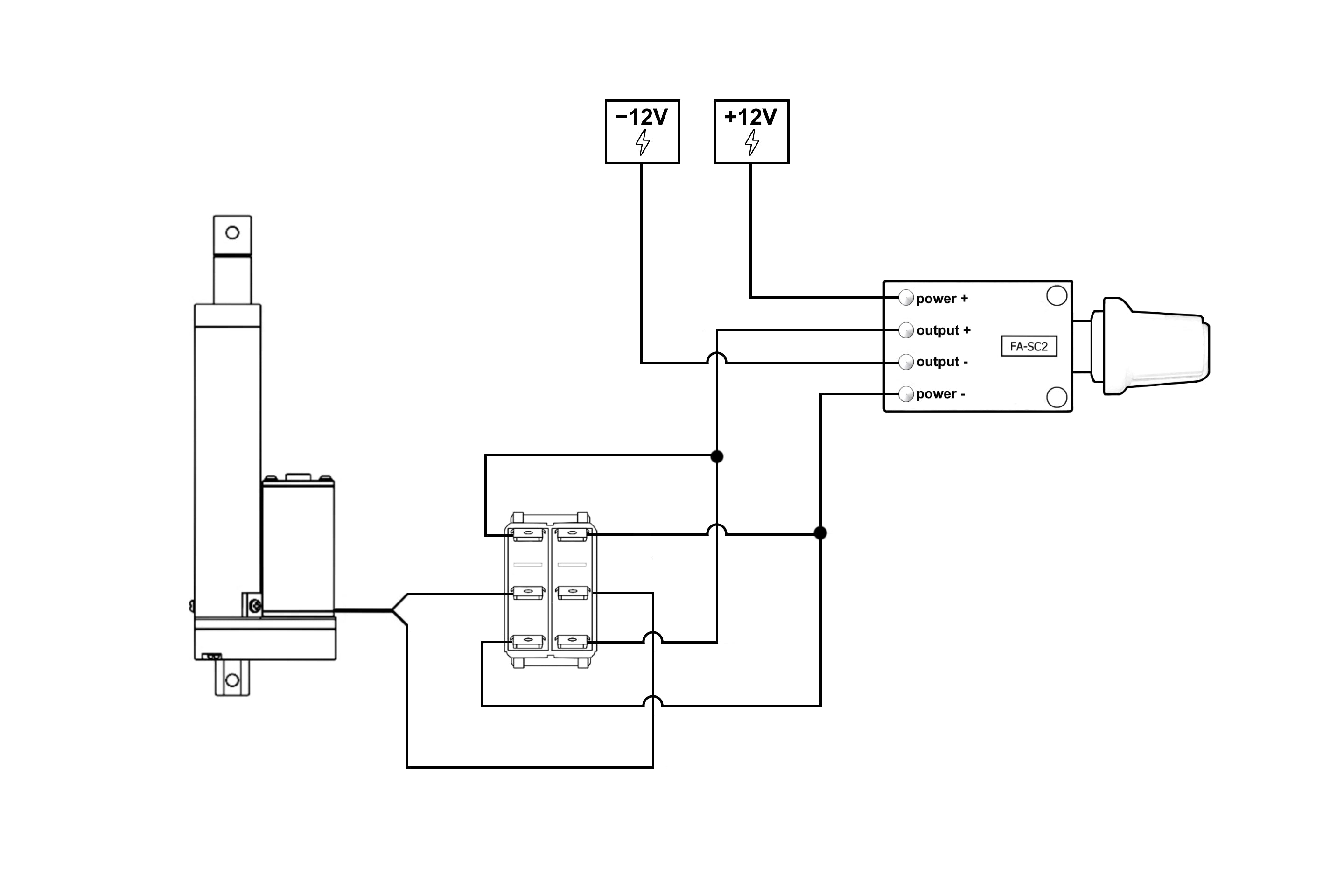
精度を確保し、エラーを回避するために、速度コントローラーによって支配される線形アクチュエータは、速度を継続的に監視し、再評価します。次の配線図は、最適なパフォーマンスと制御のために、線形アクチュエーターをロッカースイッチと速度コントローラーに接続する方法を示しています。
速度コントローラーとアクチュエーターの配線図
フィードフォワードコントロール
線形アクチュエーターと速度制御のコンテキストでは、フィードフォワードコントロールは重要な概念です。このアプローチは、コントローラーとして、ユーザーは速度コントローラーの出力を正確に予測し、それに応じて必要な調整を行うことができるという仮定の下で動作します。速度規制のための制御ループの主な目的は、アクチュエーターの速度を最適化して、特定のタスクの要件と一致することです。すべての変数が一定のままである場合、フィードフォワードコントロールにより、ユーザーは、センサーの値に基づいて、アクチュエータのデューティサイクルとその速度との関係に関して情報に基づいた予測を行うことができます。
デューティサイクルを計算することにより、ユーザーは推定のエラーを最小限に抑えながら、目的の速度を正確に達成できます。このアプローチは、ターゲットを完全にオーバーシュートし、完全に欠落するリスクを軽減したり、ターゲットに到達する前に早期に停止したりするため、線形アクチュエータを利用するという基本的な目的が損なわれます。
DC速度コントローラーがアクチュエータの速度を制御する方法
パルス幅変調(PWM)を利用するDC速度コントローラーは、Aの速度を調節するように設計された洗練された電子デバイスです DCアクチュエータ。 PWMは、一定の周波数で電源を迅速にオン /オフすることにより、DCモーターに供給される平均電圧の制御を可能にする手法です。 DCアクチュエータの速度は、各サイクル内のオフタイムに対して時間(デューティサイクル)を調整することで変調できます。
PWMを使用したDC速度コントローラーがどのように動作してDCアクチュエータの速度を制御するかの概要を次に示します。
- 頻度:PWMコントローラーは、一定の周波数四波信号を生成します。これは、オンとオフ期間の交互とオフの状態で構成されます。この周波数は通常、アクチュエーターのモーターがスイッチングアクションを認識せず、滑らかな速度制御をもたらすほど十分に高いです。
- デューティサイクル: デューティサイクル 1つのサイクル中に信号がオン状態に残る時間の割合を指します。デューティサイクルを変化させることにより、アクチュエーターのモーターに供給される平均電圧を制御できます。より高いデューティサイクルはより高い平均電圧に対応し、アクチュエーター速度が高速になり、デューティサイクルが低いと平均電圧が低くなり、その結果、アクチュエータ速度が遅くなります。
- 変調:ユーザーまたは自動化システムがDCアクチュエータの希望する速度を調整すると、PWMコントローラーはそれに応じてデューティサイクルを変更します。これにより、適切な平均電圧がアクチュエータに供給され、その速度を正確に制御できます。
- 効率:PWM速度コントローラーは、完全にオン状態と完全にオフ状態を急速に切り替えるため、熱の形でのエネルギー損失が最小限に抑えられます。これにより、PWMはDCアクチュエータの速度を制御するための非常に効率的な方法になります。
要約すると、PWMを使用するDC速度コントローラーは、一定の周波数と異なるデューティサイクルで四角い波信号を生成することにより機能します。デューティサイクルを調整することにより、コントローラーはDCアクチュエータモーターに供給される平均電圧を調整し、高エネルギー効率を維持しながらその速度を正確に制御できるようにします。
なぜスピードコントローラーを使用したいのですか?
-
精密制御:速度コントローラーの主な利点は、アクチュエータの速度を正確に制御できることです。 この機能により、人々はアクチュエータの速度を微調整し、手元の特定のタスクまたはアプリケーションに対して最適に動作するようにします。 精度で目的の速度を達成することにより、システムの全体的なパフォーマンスと有効性を高めることができます。
-
適応性:さまざまなアプリケーションは、多くの場合、さまざまな速度要件を要求するか、操作中に調整を必要とします。 FIRGELLI スピードコントローラーは、アクチュエーターの速度を簡単に変更および適応させるための柔軟性を提供し、各アプリケーションの独自の需要を満たすことができます。この適応性により、エンジニアはさまざまなシナリオでシステムパフォーマンスを最適化することができます。
-
円滑な運用:速度コントローラー、特に最も適切な速度コントローラーが行うパルス幅変調(PWM)テクノロジーを使用する速度コントローラーは、アクチュエータの速度を円滑かつ一貫した制御を提供するという利点を提供します。この滑らかな操作は、アクチュエータの機械的ストレスと摩耗を最小限に抑え、それによってサービス寿命を延ばすため、重要です。
-
同期:特定のアプリケーションでは、複数のアクチュエーター間で同期した動きが必要です。そのような場合、速度コントローラーは、関係するすべてのアクチュエーター全体で一貫した速度を維持する上で極めて重要な役割を果たします。この同期により、正確な調整と調和のとれた動作が保証され、システム全体のパフォーマンスと機能が最適化されます。
スピードコントローラーから速度を下げて低くすると、聞こえるハイピッチサウンドは何ですか?
速度を低下させると速度コントローラーから来る甲高い音は、通常、アクチュエータの速度を調節するために使用されるパルス幅変調(PWM)技術のスイッチング周波数によって引き起こされます。
PWMは、一定の周波数で電源をモーターのオンとオフに迅速に切り替えることを伴います。速度が低下すると、デューティサイクル(信号がオン状態にある時間の割合)が減少し、モーターが平均電圧を減らします。場合によっては、PWM周波数またはその高調波は、人間の聴覚の可聴範囲(20 Hz〜20 kHz)に該当する可能性があります。
音は、PWM周波数またはその高調波に共鳴する速度コントローラー内のモーターコイルまたは他のコンポーネントの振動により生成される場合があります。この振動は、モーターコイルの電流によって生成された磁場の急速な膨張と収縮が、オン状態とオフ状態を切り替えるときに生成されることによって引き起こされます。
速度が低くなると、デューティサイクルが減少し、各スイッチングサイクル中にモーターの電力が少なくなります。このパワーの変化により、可聴ノイズがより顕著になる可能性があります。さらに、システムの特定の共振周波数は、モーターおよび速度コントローラーの機械的および電気的特性に応じて、可聴ノイズを生成する可能性があります。




