3番目のクラスレバーをどのように計算しますか

3番目のレバーは、努力アームが支点と負荷の間にあるレバーの一種です。ロードアームは常に努力アームよりも長いです。第1クラスレバーとセカンドクラスのレバーとは異なり、サードクラスのレバーは力を増幅しません。代わりに、負荷の移動の速度または距離を増やすために使用されます。
サードクラスのレバーとセカンドクラスのレバーの主な違いは、支点に対する努力と負荷の位置です。
セカンドクラスのレバーでは、負荷は支点と努力の間にあり、 一方、サードクラスのレバーで、努力は支点と負荷の間にあります。努力アームは、セカンドクラスのレバーのロードアームよりも常に長くなりますが、ロードアームは常にサードクラスのレバーの努力アームよりも長くなっています。第3クラスのレバーでは、負荷を持ち上げるのに必要な力は2番目のクラスのレバーよりもはるかに多いことを覚えています。 負荷の違いを確認するには、以下の計算機を試してください。
もう1つの重要な違いは、レバーの動作方法です。セカンドクラスのレバーは、力を増幅するように設計されており、より大きな荷重を動かすためのより少ない努力を可能にします。一方で、 サードクラスのレバーは、速度を上げるように設計されています または、それを動かすのに必要な力を犠牲にして、負荷の移動の距離。
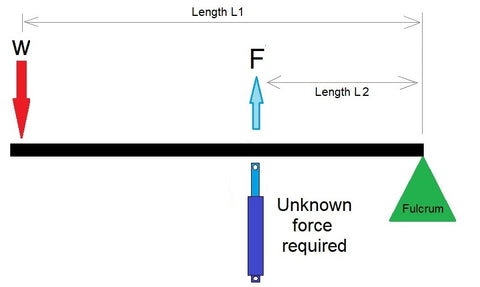
サードクラスのレバーで必要な努力を計算する式は次のとおりです。
努力x努力アーム=ロードxロードアーム
どこ:
- 努力:荷重を動かすためにレバーに適用される力
- 努力部門:支点から努力が適用される地点までの距離
- 負荷:レバーによって移動される重量または抵抗
- 負荷腕:支点から荷重が適用されるポイントまでの距離
方程式内の変数のいずれかを見つけるには、他の3つの変数を既知する必要があります。
3番目のクラスレバーの電卓
結果
不明な力が必要なF2:
0ポンド
0 n
0 kg
0 g
0トン
3番目のクラスレバーの例
第3クラスのレバーの実際の例の1つは、人間の腕です。肘関節は支点として機能し、上腕二頭筋の筋肉が努力を提供し、重量を保持する手は負荷として機能します。肘関節を曲げることにより、上腕二頭筋の筋肉は荷物(手の重量)を肩に向かって動かすことができ、負荷によって移動する距離を増やします。
3番目のレバーのその他の例には、ピンセット、釣り竿、シャベル、ほうきが含まれます。
第3クラスのレバーの計算機は、レバーを使用して負荷を移動するために必要な力または努力を決定する必要があるエンジニア、愛好家、DIY愛好家に役立ちます。それは、望ましい動きまたは力を達成するための努力と負荷に最適な場所を見つけることにより、レバーの設計を最適化するのに役立ちます。
wヘンは2番目のクラスレバーが3番目のクラスレバーになります
レバーの各クラスには、努力、負荷、および支点の特定のコンポーネントの特定の配置があるため、レバーはクラスを直接変更することはできません。レバーの3つのクラスは、これらのコンポーネントの相対位置によって定義されます。
- ファーストクラスレバー:支点は努力と負荷の間にあります。
- セカンドクラスレバー:負荷は支点と努力の間です。
- サードクラスのレバー:努力は支点と負荷の間にあります。
2番目のクラスレバーは、適用された力または負荷を変更するだけで、3番目のクラスレバーになることはできません。代わりに、レバーコンポーネントの配置を変更する必要があります。 努力が支点と負荷の間の位置に移動すると、レバーは3番目のクラスレバーになります。
他のクラスのレバーを理解するために、以下に示すものに関するいくつかのブログ投稿を作成しました。
1番目のクラスレバー計算機
2番目のクラスレバー計算機
3番目のクラスレバー計算機
2番目と3番目のクラスのレバーの現実の例





