フィードバックを利用して、ロボットからテレビリフトまでの自動化プロジェクトでは、正確な動きを確保することが重要です。フィードバックの適切な実装により、正確なクローズドループ制御が可能になります リニアアクチュエータ;線形アクチュエーターが正しい位置に行くことを手動で確認する必要はもうありません。線形アクチュエーターは通常、オブジェクトをある位置から別の位置に移動するために使用されるため、アクチュエータから受け取る最も重要なフィードバックはその位置です。位置フィードバックを持つ線形アクチュエーターは、通常、3つの異なるセンサーのいずれかを使用して位置を測定します。ポテンショメータ、ホール効果センサー、および光学センサー。
ポテンショメータ
ポテンショメータ 線形アクチュエータで使用すると、アクチュエータの位置に基づいて抵抗が変化する可変抵抗です。ポテンショメータは、以下に示すように3つのピンで構成され、ピン1は入力電圧、ピン3は接地、ピン2は調整可能な抵抗器です。ピン2とグランドの間の電圧を測定することにより、ポテンショメータの出力を読み取ることができます。これは、アクチュエータが移動するにつれて変化します。効果的に このフィードバックを実装します、あるタイプのコントローラーを使用する必要があります。 Arduino、アクチュエータが移動するときにこの位置値を読み取ります。

ポテンショメータの最大の強みの1つは、線形アクチュエータの絶対位置の兆候を提供することです。このため、このフィードバックは、現在の出力読み取り値を希望の位置の出力読み取り値と比較できるため、コントローラーのソフトウェアで非常に簡単に処理できます。また、ポテンショメータの抵抗が駆動されているかどうかに関係なく同じになるため、システムをオフにする場合、アクチュエータの位置を失うことを心配する必要はありません。

位置フィードバックにポテンショメータを使用することの欠点はほとんどありません。 1つの欠点は、ポテンショメータからのフィードバックが電気ノイズの影響を受ける可能性があり、安定した結果を達成するために信号をフィルタリングする必要がある場合があることです。ポテンショメータの出力は、ポテンショメータへの入力電圧にも依存しているため、出力信号が入力電圧のわずかな変化によりわずかに変化する可能性があるため、複数の線形アクチュエータが同時に動くことを保証することが困難になる可能性があります。また、ポテンショメータは一般に、他のフィードバックオプションと比較して、線形アクチュエーターの小さな動きにそれほど敏感ではなく、再現性のある結果をより困難にします。
ホールエフェクトセンサー
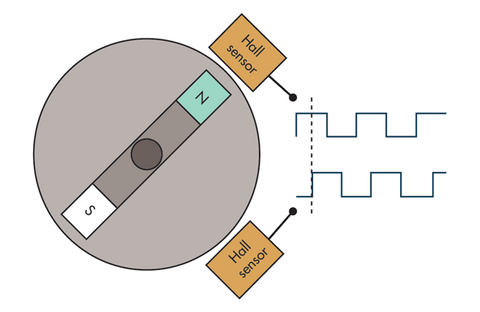
ホールエフェクトセンサー 磁場が電圧を生成する効果であるホール効果に基づいた作業。ホールエフェクトセンサーは、デジタルまたは線形出力を提供できますが、線形アクチュエーターの場合、通常、デジタル出力ホール効果センサーを使用します。これらのセンサーが磁場を検出すると、コントローラーが読み取ることができる電圧が生成されます[1]。線形アクチュエーターを使用すると、これらのセンサーはアクチュエータのギアボックス内に磁気ディスクとともに配置されます。線形アクチュエータが移動すると、この磁気ディスクが回転すると、電圧のパルスを生成するホール効果センサーを通過します。これらのパルスを使用して決定できます アクチュエーターがどこまで移動したか。一般に、ホール効果センサーを使用して位置フィードバックを提供する線形アクチュエーターは、アクチュエータがどの程度移動するかを判断するために使用できる1インチあたりのパルスを指定します。たとえば、6000個のパルスを検出し、アクチュエータに1インチあたりのパルスが12000インチのパルスを持っている場合、アクチュエーターが0.5インチ移動したことを意味します。
ポテンショメータと比較して位置フィードバックにホールエフェクトセンサーを使用することの主な欠点は、ホール効果センサーが絶対位置を測定しないことです。代わりに、アクチュエーターがどこまで移動したかを判断するためにカウントできるパルスを生成します。これにより、アクチュエータが絶対位置を決定する場所を知る必要があります。これは、Arduinoのようなコントローラーのソフトウェアで、アクチュエーターの現在の位置を保存し、常に完全に格納されたような既知の位置からアクチュエータを開始することにより、克服できます。これには、システムをオンにするたびにアクチュエータをこの既知の位置に在宅する必要がある場合があります。
位置フィードバックにホールエフェクトセンサーを使用する強度は、ポテンショメータからのフィードバックと比較して、はるかに大きな解像度を提供することです。 1インチあたりのパルスが1インチあたりのパルスがある可能性があるため、ホールエフェクトセンサーは、線形アクチュエータの配置において精度と信頼性を提供します。パルスはまた、線形アクチュエータの速度に基づいて周波数が異なります。つまり、線形アクチュエータの速度を測定するために使用できます。また、ホール効果センサーは、ポテンショメータの変化する電圧よりもパルスカウントがより正確であるため、複数の線形アクチュエーターが同時に一緒に移動するようにするためのより大きな能力を提供します。私たちを活用します FA-SYNC-Xアクチュエータコントローラー、荷物に関係なく、アクチュエーターが一斉に動くことを確認することもできます。
光学センサー
光学センサー 線形アクチュエーター(他のタイプの光学センサーがあります)で使用されているのは、光検出器を使用して光を検出することを除いて、ホール効果センサーに非常によく似ています[2]。光学センサーは、LEDまたは他の光源からの光をエンコーダーディスクに渡すことで機能します。このエンコーダーディスクは、ライトが定期的に通過できるようにスロットされています。ディスクの反対側には、ディスク内のスロットを通過して出力信号を作成すると光が検出されるフォトセクターがあります[3]。アクチュエータが移動すると、エンコーダーディスクが回転し、光が電圧のパルスを生成する光検出器によって検出されます。これらのパルスは、ホールエフェクトセンサーのパルスと同様に使用して決定できます。 アクチュエーターがどこまで移動したか。位置フィードバックに光学センサーを使用する線形アクチュエーターは、アクチュエータがどの程度移動するかを判断するために使用できる1インチあたりのパルスを指定します。

繰り返しますが、光学センサーは、ポテンショメータと比較した場合、ホール効果センサーと同様の強度と欠点を持っています。それらは、より高い精度と解像度を持ち、ホール効果センサーよりも大きく、線形アクチュエータの速度を測定するために使用できます。また、複数の線形アクチュエータが同時に移動するようにするのにも優れています。 FA-SYNC-Xアクチュエータコントローラー。また、絶対的な位置を測定せず、代わりにパルスをカウントして、アクチュエーターがどこまで移動したかを判断する必要があります。また、絶対位置を追跡するためにソフトウェアの現在の位置を保存する必要があるため、既知の位置から開始する必要があります。
まとめ
あなたがあなたから望むフィードバックのタイプの選択 リニアアクチュエータ アプリケーションにとってより重要であると感じるものに依存します。高レベルの精度が必要ですか?光学またはホール効果センサーを備えた線形アクチュエーターを選択します。あなたがそれをオンにするたびにあなたのアクチュエータを家の位置に設定する必要はありませんか?次に、ポテンショメータを備えた線形アクチュエーターを使用します。複数の線形アクチュエーターを同時に制御しますか?光学またはホール効果センサーを備えた線形アクチュエーターを選択します。フィードバックに絶対的なポジションを提供したいですか?ポテンショメータを備えた線形アクチュエータを使用します。
[1]モナリ、G。(2013年6月) 光学エンコーダーと磁気エンコーダーの解像度を理解します。から取得: https://www.electronicdesign.com/technologies/components/article/21798142/understanding-resolution-in-optical-and-magnetic-encoders
[2] Paschotta、R。 光学センサーに関する記事。 から取得:https://www.rp-photonics.com/optical_sensors.html



