In questo esempio controlineremo la direzione di un attuatore lineare con un Arduino e due interruttori momentanei. Questa esercitazione si basa sui principi illustrati nell'esercitazione "Controllo della velocità del conducente del motore con arduino", si consiglia di rivedere tale tutorial prima di continuare.
Questo tutorial è suddiviso in due sezioni: pulsanti che agiscono in modalità momentanea (cioè gli attuatori smettono di muoversi quando il pulsante viene rilasciato) e pulsanti che agiscono in modalità di sostegno (cioè gli attuatori continuano a muoversi anche quando il pulsante viene rilasciato).
Nota: questa esercitazione presuppone conoscenze preliminari con i principi elettronici di base, l'hardware e il software Arduino. Se questa è la tua prima volta che usi Arduino, ti consigliamo di imparare le basi da uno dei tanti fantastici tutorial per principianti disponibili tramite ricerche su Google e YouTube. Tieni presente che non abbiamo le risorse per fornire supporto tecnico per le applicazioni personalizzate e non eseguiremo il debug, la modifica, fornirà codice o i diagrammi di cablaggio al di fuori di queste esercitazioni disponibili pubblicamente.
Componenti
- Attuatore lineare 12V
- Alimentatore da 12V
- Arduino
- Conducente del motore
- Due pulsanti momentanei (facoltativamente un terzo pulsante per il controllo dell'aggancio)
- Fili elettrici per la realizzazione di collegamenti e di impianti di crimpatura o saldatura di ferro
Cablaggio
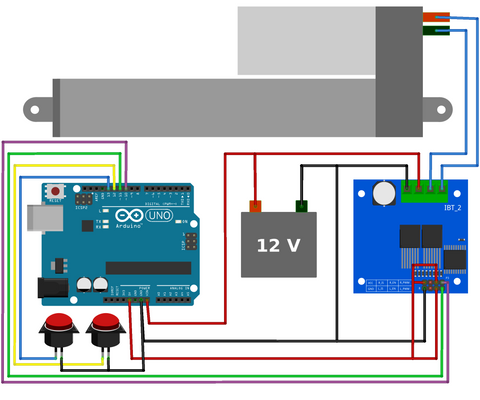
Panoramica hardware e software per un controllo momentaneo
Gli interruttori momentanei vengono utilizzati quando si desidera che l'attuatore si muova solo mentre viene premuto il pulsante, l'attuatore smetterà automaticamente di muoversi quando il pulsante viene rilasciato. Carica il codice qui sotto.
Codice per il controllo momentaneo
https://gist.github.com/Will-Firgelli/aeee209bda6b2246359eed70ec353eb8
/* Firgelli Automations
* Limited or no support: we do not have the resources for Arduino code support
*
* Program enables momentary direction control of actuator using push button
*/
int RPWM = 10; //connect Arduino pin 10 to IBT-2 pin RPWM
int LPWM = 11; //connect Arduino pin 11 to IBT-2 pin LPWM
int downPin = 12;
int upPin = 13;
int Speed = 255; //choose any speed in the range [0, 255]
void setup() {
pinMode(RPWM, OUTPUT);
pinMode(LPWM, OUTPUT);
pinMode(downPin, INPUT_PULLUP);
pinMode(upPin, INPUT_PULLUP);
}
void loop() {
if(digitalRead(upPin)==LOW){ //check if extension button is pressed
analogWrite(RPWM, 0);
analogWrite(LPWM, Speed);
}
else if(digitalRead(downPin)==LOW){ //check if retraction button is pressed
analogWrite(RPWM, Speed);
analogWrite(LPWM, 0);
}
else{ //if no button is pushed, remain stationary
analogWrite(RPWM, 0);
analogWrite(LPWM, 0);
}
}Panoramica hardware e software per sostenere il controllo
In alternativa, a volte potresti voler utilizzare un pulsante di chiusura; fare in modo che l'attuatore si muova quando si premi un pulsante e quindi si continui a muoversi quando si rilascia il pulsante. Per raggiungere questo obiettivo dovrai aggiungere un altro interruttore, collegato al pin 8 e GND, quindi caricare il programma qui sotto. Poiché l'attuatore non smetterà di muoversi quando il pulsante viene rilasciato, questo nuovo interruttore fungerà da pulsante "stop".
Codice per sostenere il controllo
https://gist.github.com/Will-Firgelli/2b96dce14c0cee7a0009e61e47cc5f67/* Firgelli Automations
* Limited or no support: we do not have the resources for Arduino code support
*
* Program enables latching direction control of actuator using push button
*/
int RPWM = 10; //connect Arduino pin 10 to IBT-2 pin RPWM
int LPWM = 11; //connect Arduino pin 11 to IBT-2 pin LPWM
int stopPin = 8;
int downPin = 12;
int upPin = 13;
int Speed = 255; //choose any speed in the range [0, 255]
void setup() {
pinMode(RPWM, OUTPUT);
pinMode(LPWM, OUTPUT);
pinMode(stopPin, INPUT_PULLUP);
pinMode(downPin, INPUT_PULLUP);
pinMode(upPin, INPUT_PULLUP);
}
void loop() {
if(digitalRead(upPin)==LOW){ //check if extension button is pressed
analogWrite(RPWM, 0);
analogWrite(LPWM, Speed);
}
else if(digitalRead(downPin)==LOW){ //check if retraction button is pressed
analogWrite(RPWM, Speed);
analogWrite(LPWM, 0);
}
else if(digitalRead(stopPin)==LOW){ //check if retraction button is pressed
analogWrite(RPWM, 0);
analogWrite(LPWM, 0);
}
}


