"Pourquoi mes actionneurs ne se déplacent-ils pas de manière synchrone lorsqu'ils sont connectés à la même alimentation 12V?"

De nombreux clients comptent sur les actionneurs linéaires Firgelli pour automatiser le levage du couvercle de la trappe de leur camion, pour dissimuler une trappe menant à la cave à vin ou pour actionner un frein à air sur une Lamborghini. Pour réaliser ces projets, deux actionneurs peuvent être placés de chaque côté de la trappe pour la soulever, mais parfois un client nous contactera pour nous informer que soit leur trappe s'est cassée, soit le moteur a grillé parce que les actionneurs ne se déplaçaient pas à la même vitesse.
Ce qui se passe? Heureusement, nous pouvons affirmer avec certitude que ce n'est pas un défaut de conception de nos actionneurs linéaires, mais plutôt une propriété inhérente à tous les moteurs à courant continu. Que ce soit le nôtre ou celui d'un concurrent, deux moteurs CC ne bougera jamais parfaitement en synchrone les uns avec les autres sans boucle de rétroaction fermée à l'aide d'un encodeur.
Il existe de nombreuses raisons à cela, notamment, mais sans s'y limiter:
- Tolérances de fabrication permettant de petites variations
- Différentes charges / couples appliqués à chaque arbre moteur
- Variations du frottement bague / roulement
- Différences d'usure mécanique
Ces petites différences se combinent et il est réaliste de s'attendre à une différence de vitesse de 5 à 10% entre les moteurs à courant continu ou les actionneurs linéaires. Heureusement, il existe plusieurs méthodes pour surmonter cette différence de vitesse inhérente.
Comment faire fonctionner les actionneurs linéaires à la même vitesse
Si vous avez acheté (ou prévoyez) un actionneur linéaire à tige de rétroaction, actionneur linéaire à rétroaction optique, Bullet série 36 Cal, ou Actionneur linéaire Bullet série 50 Cal, cette section fournira des informations sur la façon de les déplacer de manière synchrone.
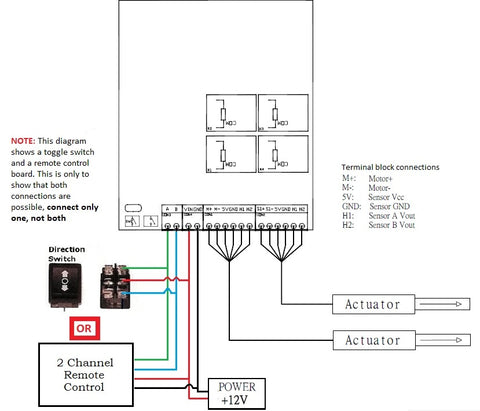
1) Boîte synchrone FA-SYNC-4 ou FA-SYNC-2 (fortement recommandé)
La boîtier de commande synchrone est de loin la méthode la plus fiable pour synchroniser le mouvement de deux à quatre actionneurs linéaires. Vous aurez besoin du même type d'actionneur exclusivement dans la liste suivante:
- Actionneur Série Optique 200lb
- Actionneur Série Optique 400lb
- 12V Bullet Série 36 Cal. Actionneur
- 12V Bullet Série 50 Cal. Actionneur
Ce boîtier de commande offre une solution «plug and play» prête à l'emploi, une fois câblé, tout ce que vous avez à faire est d'appuyer sur un bouton et le système s'étalonnera automatiquement, puis vous pouvez contrôler intuitivement jusqu'à 4 actionneurs en synchronisme sous n'importe quel charge. Voir cette tutoriel dédié sur l'utilisation des boîtiers de commande synchrone FA-SYNC-2 et FA-SYNC-4.
2) broches d'interruption Arduino
Cette méthode fonctionnera avec les séries Optical et Bullet, ces actionneurs ont respectivement des encodeurs optiques et à effet Hall. En comptant le nombre d'impulsions, le déplacement de la tige peut être calculé. L'application d'algorithmes de contrôle permet un contrôle synchrone. Cela nécessite que vous connectiez le signal des encodeurs aux broches d'interruption de l'Arduino. C'est un projet avancé; nous ne fournissons pas de support pour les logiciels ou la programmation.
3) broches analogiques Arduino
Cette méthode ne fonctionnera qu'avec actionneur linéaire à tige de rétroaction. L'actionneur linéaire à tige de rétroaction a un potentiomètre intégré donnant une sortie analogique qui peut être lue et convertie en lecture de position. Un tutoriel expliquant comment faire cela en utilisant un Arduino est lié Ici; alors que ce tutoriel est complet, une certaine connaissance de la programmation et Arduino est supposé. En outre, ce tutoriel montre seulement comment obtenir une lecture à partir du capteur; c’est à vous d’écrire un logiciel pour le contrôle synchrone. Il s’agit d’un projet avancé; nous ne fournissons pas de support pour les logiciels ou la programmation.
Comment exécuter des actionneurs linéaires à (presque) la même vitesse
Cette section va passer en compte la façon de déplacer les actionneurs linéaires qui n’ont pas de codeurs intégré pour le contrôle de rétroaction. Si vous n’avez pas encore acheté vos actionneurs linéaires, nous vous suggérons de sauter cette section et de vous en tenir aux méthodes discutées dans la section précédente qui utilise des actionneurs linéaires Firgelli avec des encodeurs positionnels intégrés. Toutefois, si vous avez déjà acheté un actionneur linéaire qui n’a pas ces encodeurs positionnels intégrés tels que le Classique Firgelli Ou Firgelli Premium actionneurs linéaires et veulent toujours les déplacer à (presque) la même vitesse, continuer à lire cette section.
Note: nous n’arrêtons pas de dire (presque) la même vitesse parce qu’il est physiquement impossible de déplacer les actionneurs exactement à la même vitesse sans contrôle de rétroaction en boucle fermée.
1) Ne rien faire
La solution la plus simple peut ne pas s’inquiéter de la petite différence de vitesse de 5-10%, surtout si le coup de votre actionneur est petit (<6 pouces), car ils ne différent pas en hauteur trop radicalement. Au lieu d’introduire une certaine flexibilité dans votre système, par exemple si vous construisez une trappe avec deux actionneurs, vous pouvez la concevoir de telle sorte que le corps de l’écoutille peut tourner / tourner légèrement de sorte que toute différence dans la vitesse de l’actionneur sera absorbé par le système.
2) Contrôleur de vitesse
Si un actionneur se déplace plus vite que le second, vous pouvez utiliser un contrôleur de vitesse sur l’actionneur rapide pour réduire sa vitesse. Cette boîte de commande utilise la modulation de la largeur des impulsions (PWM) pour ajuster la vitesse à laquelle un actionneur se déplace. Pour plus d’informations, consultez notre tutoriel : Comment utiliser les contrôleurs de vitesse avec les actionneurs linéaires Firgelli. Réglage de la vitesse est une forme d’art et ne se traduira pas par l’appariement de vitesse parfaite entre plusieurs actionneurs, mais c’est le meilleur résultat possible lorsque vous n’utilisez pas de rétroaction.
3) Contrôle de vitesse Arduino
Au lieu d’utiliser notre contrôleur de vitesse hors plateau, vous pouvez utiliser un Arduino pour varier la vitesse des actionneurs à l’aide d’un signal PWM. Nous n’encourageons pas cette méthode si vous n’avez pas déjà d’expérience avec Arduino. Bien que Firgelli ne fournisse pas Arduino ou un support de programmation, nous avons un tutoriel aperçu sur comment varier la vitesse à l’aide d’un Arduino et d’un conducteur.



