Détecteurs de mouvement
Les détecteurs de mouvement, comme leur nom l'indique, sont des capteurs utilisés pour détecter le mouvement. Ils sont couramment observés dans les alarmes de sécurité et les systèmes d'éclairage déclenchés par le mouvement, mais peuvent être utilisés en conjonction avec des actionneurs linéaires pour une large gamme d'applications sympas. Une application courante de actionneurs linéaires Et les détecteurs de mouvement utilisés ensemble se trouvent dans des maisons hantées pour des peurs de saut. Mais ensemble, les actionneurs linéaires et les détecteurs de mouvement peuvent également être utilisés pour un large éventail de projets domestiques.

Lorsque vous pensez aux détecteurs de mouvement, vous pensez généralement à 2 types:
- Infrarouge passif - qui mesure les changements de chaleur corporelle (énergie infrarouge) pour détecter le mouvement
- Four micro onde - qui mesure les réflexions des objets à l'aide de micro-ondes pour détecter le mouvement
Ces deux types de détecteurs de mouvement sont les plus courants car ils sont souvent utilisés dans des applications comme les systèmes de sécurité. Bien qu'il existe de nombreux autres types de détecteurs de mouvement disponibles, y compris les capteurs de réflexion sur la zone, qui utilise la lumière induite, les capteurs de vibration et les capteurs à ultrasons [1]. Pour une utilisation avec des amateurs et des projets de bricolage, le type de détecteur de mouvement le plus couramment disponible et le plus utilisé est le capteur de mouvement infrarouge passif (PIR). Pour cette raison, le reste de ce blog se concentrera sur la façon d'utiliser un détecteur de mouvement PIR avec votre actionneur linéaire. Bien que chaque type de capteur aura des implémentations différentes, une grande partie de ce qui est décrit ci-dessous sur la façon de contrôler un actionneur linéaire avec un détecteur de mouvement sera similaire pour tous les types de détecteurs de mouvement.
Qu'en est-il des capteurs de proximité?
Les capteurs de proximité ne sont pas des détecteurs de mouvement car ils détectent la proximité d'un objet plutôt que de mouvement. Fonctionnellement, un capteur de proximité Peut vous dire à quel point un objet est proche du capteur si l'objet se déplace ou non. Tandis que les détecteurs de mouvement ne déclenchent que lorsqu'il y a un mouvement, quelle que soit la proximité d'un objet. Vous pouvez utiliser des capteurs de proximité comme détecteurs de mouvement car la sortie des capteurs de proximité changera lorsqu'un objet ou une personne se déplace devant le capteur. Bien que les capteurs de proximité ne détectent que la proximité de l'objet le plus proche du capteur, donc si quelque chose devait se déplacer derrière l'objet le plus proche, le capteur de proximité ne détecterait pas ce mouvement. Bien que l'utilisation d'un capteur de proximité comme détecteur de mouvement soit possible, ce n'est peut-être pas la meilleure solution pour votre conception.

Configuration de votre détecteur de mouvement PIR
Si vous cherchez à concevoir votre propre robot de peur de saut pour Halloween ou à avoir un autre projet sensible au mouvement à l'esprit, vous voudrez utiliser votre détecteur de mouvement PIR comme commutateur d'entrée pour déterminer quand votre actionneur linéaire devrait se déplacer. Pour ce faire, vous allez vouloir utiliser un microcontrôleur, comme un Arduino, pour lire la sortie de votre détecteur de mouvement PIR et pour piloter votre actionneur linéaire. La sortie du détecteur de mouvement PIR est similaire à un simple bouton-poussoir, lorsqu'il y a un mouvement, le capteur enverra un signal ou une tension élevée au microcontrôleur et lorsqu'il n'y a pas de mouvement, il enverra un signal ou une tension faible. Vous pouvez également tester votre capteur PIR avant de l'installer dans votre conception car certains capteurs PIR vous permettent d'ajuster la sensibilité du capteur pour de meilleures performances.
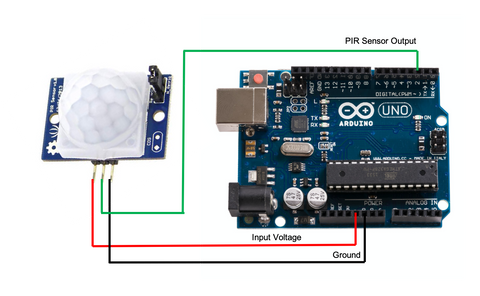
Comme vous ne saurez pas quand quelqu'un marchera passer votre détecteur de mouvement, vous devrez soit lire constamment la sortie du capteur PIR dans la boucle principale de votre code, soit vous pouvez utiliser des interruptions externes. Les interruptions externes sont des épingles de l'Arduino qui détectent un changement de tension et dans notre cas peuvent être utilisés pour alerter l'Arduino que notre capteur PIR a détecté le mouvement. Selon votre application, l'une ou l'autre méthode de lecture de la sortie du capteur PIR est possible, bien que ce dernier soit considéré comme la meilleure pratique car il garantit que votre code ne manquera aucun mouvement détecté par le capteur PIR. Si vous prévoyez d'utiliser une interruption externe pour détecter un changement par rapport à votre détecteur de mouvement, vous devrez consulter la fiche technique de votre Arduino pour vous assurer quelles broches de votre microcontrôleur peuvent être utilisées comme broches d'interruption. Sinon, vous pouvez simplement connecter la sortie du capteur PIR à l'une des broches d'entrée numériques de l'Arduino. Le capteur PIR devra également être connecté à une source d'alimentation appropriée et à un terrain commun.
Actionneur linéaire contrôlé de mouvement
Dans les deux exemples ci-dessous, l'Arduino contrôle l'actionneur linéaire en utilisant un moteur. Pour apprendre à conduire un actionneur linéaire avec un pilote de moteur ou d'autres composants intermédiaires, comme relais, vous pouvez consulter notre message sur Comment contrôler un actionneur linéaire avec un arduino. De plus, aucun exemple ci-dessous n'utilise un Actionneur linéaire de rétroaction ou interrupteurs de limites externes Dans leur conception, ce qui vous donnerait plus de contrôle sur votre actionneur que sans. Si vous êtes intéressé sur la façon et les options de commentaires disponibles, vous pouvez consulter notre message sur le sujet ici.
| bool motionDetected = LOW; // Motion Detection Flag | |
| void setup() { | |
| /*Setting Up Interrupt*/ | |
| pinMode(2, INPUT); | |
| attachInterrupt(digitalPinToInterrupt(2), motionDetector, RISING); | |
| } | |
| void loop() { | |
| } | |
| /*Interrupt Service Routine*/ | |
| void motionDetector(void){ | |
| motionDetected = HIGH; | |
| } |
L'exemple de code ci-dessus montre comment configurer une interruption dans l'ide Arduino où l'interruption sera déclenchée sur le bord montant de l'impulsion de tension. Vous pouvez configurer votre interruption pour être déclenché à différents points dans un changement de tension et devrait consulter la fiche technique de votre microcontrôleur pour déterminer les options disponibles. Une fois que vous avez identifié et sélectionné une broche d'interruption appropriée, le dernier aspect que vous devez faire pour configurer votre interruption est d'écrire votre routine de service d'interruption. La routine de service d'interruption est une fonction simple que le code s'exécutera chaque fois que l'interruption est déclenchée. Dans notre cas, notre Interrupt Service Routine MotionDetector définit simplement le Flag MotionDetected en haut lorsque l'interruption est déclenchée.
| bool motionDetected = LOW; // Motion Detection Flag | |
| long timeStamp = 0; // Time when Actuator Starts Extending | |
| static long delayTime = 10000; // Delay after Motion Detector is Triggered in ms | |
| void setup() { | |
| pinMode(10, OUTPUT); // Configure pin 10 as an Output | |
| pinMode(11, OUTPUT); // Configure pin 11 as an Output | |
| /*Setting Up Interrupt*/ | |
| pinMode(2, INPUT); | |
| attachInterrupt(digitalPinToInterrupt(2), motionDetector, RISING); | |
| } | |
| void loop() { | |
| if(motionDetected == HIGH){ | |
| /*Extend Linear Actuator*/ | |
| analogWrite(10, 255); | |
| analogWrite(11, 0); | |
| if(millis() - timeStamp > delayTime){ | |
| motionDetected = LOW; | |
| } | |
| } else{ | |
| /*Retract Linear Actuator*/ | |
| analogWrite(10, 0); | |
| analogWrite(11, 255); | |
| timeStamp = millis(); | |
| } | |
| } |
Une fois que votre Arduino a lu la sortie de votre capteur PIR, soit en utilisant une interruption externe, soit en lisant simplement la sortie, comment vous utilisez ces commentaires pour contrôler votre actionneur linéaire dépendra de votre conception et de votre application. Comme le capteur PIR fournit seulement une rétroaction binaire, comme un bouton-poussoir, le niveau de contrôle sur l'actionneur linéaire sera limité. Une façon de contrôler l'actionneur linéaire avec cette rétroaction est de dire à l'actionneur de se déplacer chaque fois que le mouvement est détecté, ce qui pourrait être utile dans des applications telles que les sauts robotiques qui font peur dans une maison hantée. Le code ci-dessus montre comment vous pouvez implémenter cette conception. Une fois que le drapeau de mouvement est réglé sur haut, nous étendons l'actionneur linéaire vers l'avant et après 10 secondes, le drapeau est réinitialisé à faible et l'actionneur se rétracte pour la prochaine effrayant de saut. Comme nous n'utilisons que le détecteur de mouvement pour dire à l'Arduino que quelqu'un est là, nous utilisons une minuterie pour réinitialiser le drapeau et attendre que la prochaine personne passe.
| bool motionDetected = LOW; // Motion Detection Flag | |
| long timeStamp = 0; // Time when Actuator Starts Extending | |
| static long delayTime = 60000; // Delay after Motion Detector is Triggered in ms | |
| bool timerFlag = LOW; // Flag for Time Delay | |
| void setup() { | |
| pinMode(10, OUTPUT); // Configure pin 10 as an Output | |
| pinMode(11, OUTPUT); // Configure pin 11 as an Output | |
| /*Setting Up Interrupt*/ | |
| pinMode(2, INPUT); | |
| attachInterrupt(digitalPinToInterrupt(2), motionDetector, RISING); | |
| } | |
| void loop() { | |
| if(timerFlag == HIGH) { | |
| if(motionDetected == HIGH){ | |
| /*Extend Linear Actuator*/ | |
| analogWrite(10, 255); | |
| analogWrite(11, 0); | |
| } else if(motionDetected == LOW) { | |
| /*Retract Linear Actuator*/ | |
| analogWrite(10, 0); | |
| analogWrite(11, 255); | |
| timeStamp = millis(); | |
| } | |
| if(millis() - timeStamp > delayTime){ | |
| timerFlag = LOW; | |
| } | |
| }else{ | |
| timeStamp = millis(); | |
| } | |
| } | |
| void motionDetector(void){ | |
| if(timerFlag == LOW){ | |
| motionDetected = !motionDetected; | |
| timerFlag = HIGH; | |
| } | |
| } |
Une autre méthode consiste à basculer entre les positions étendues et rétractées de l'actionneur linéaire à chaque fois que le mouvement est détecté, ce qui peut être utile dans les applications à domicile. La mise en œuvre de cette approche est indiquée ci-dessus. Dans la routine de service d'interruption, le mouvement du drapeau est basculé chaque fois que le capteur PIR détecte le mouvement. Lorsque le drapeau est réglé sur haut, l'actionneur linéaire est étendu et lorsque le drapeau est réglé à faible, l'actionneur est rétracté. Nous avons également ajouté un autre Flag TimerFlag qui est utilisé, ajoutez un retard après le déclenchement du détecteur de mouvement PIR. Ce drapeau est réglé haut lorsque l'interruption est déclenchée pour la première fois et n'est envoyée bas que après le délai conçu, ce qui est une minute dans cet exemple. Il est également utilisé pour garantir que la valeur du mouvement de signalisation est à basculer qu'après ce délai.
Référence:
- Tross, K. (2019, octobre). Le guide du débutant sur les capteurs de mouvement. Récupéré de: https://www.safewise.com/resources/motion-sensor-guide/



