Un nuevo proyecto de automatización puede ser desalentador; sabemos. Con todos los términos técnicos, cableado eléctrico, interfaces de control de computadora y las otras campanas y silbatos, puede ser difícil saber dónde inclusocomenzar! Cuando la incertidumbre evita que su proyecto progrese, volver a lo básico y revisar los requisitos de su proyecto puede mostrarle una ruta hacia adelante. Me gusta decir que el conocimiento es poder, perocomprensión es moneda.
Al comenzar un nuevo proyecto de automatización, o reacondicionar y reemplazar un actuador lineal en un proyecto existente, estas preguntas lo ayudarán a determinar qué actuador (s) funcionarán para su proyecto.
- ¿Cuál es la aplicación?
- ¿Está poniendo un actuador en un diseño o producto existente?
- ¿Estás diseñando un nuevo proyecto desde cero?
- ¿Cuál es la carga en la unidad o cuánta fuerza necesitas?*
- Las clasificaciones de peso del actuador son para solo cargas axiales. Para aplicaciones no lineales (como las bisagras), es posible que deba calcular la carga axial.
- ¿Cuánto accidente cerebrovascular ('viajar') necesitas?
- ¿Velocidad de movimiento requerida?
- Solenoide La velocidad de movimiento y la calificación de fuerza están inversamente relacionadas. Es posible que deba elegir entre la velocidad que desea o la fuerza que desea, dependiendo de la aplicación.
- ¿Con qué frecuencia lo necesita para operar?
- Calculamos los ciclos de servicio a los 5 minutos de uso continuo (en movimiento); La mayoría de las aplicaciones no industriales no necesitan considerar los ciclos de deber.
- ¿Otras condiciones?
- Se pueden incluir características como protección de colisión, velocidades mitigadas o control de velocidad variable con componentes adicionales.
- A veces se pueden lograr otras funciones con relés, esquemas de control y cableado creativo.
Una vez que se entienden todos los criterios anteriores, está listo para construir su sistema a partir de componentes. Un sistema de actuador básico requiere estas piezas:
- Actuador (s) & Soportes de montaje - Los soportes son específicos del actuador. Consulte las páginas de productos para obtener paréntesis adecuados
- Control S (Cambiar o Remoto o SOCIEDAD ANÓNIMA)
- La parte de control del sistema es responsable de Cambiar la polaridad del circuito del motor, que controla el Dirección del movimiento del actuador.
- Mayoría restricciones, condiciones y requisitos para un sistema automatizado están involucrados en el esquema de control.
- Interfaz con sistemas externos Se puede hacer con componentes de control en diferentes niveles de complicación.
- Fuente de alimentación - (exceder el empate de amperaje acumulativo de sus actuadores)
- El sistema más fácil posible es el Sistema de control y control de ceperación CSPS CSPS, además uno Actuador (con un sorteo 5A).

A continuación, es hora de determinar su requisitos más importantes. Encontramos que la mayoría de los proyectos encajan en una de las siguientes categorías: elevación vertical/bajada, movimiento de deslizamiento horizontal, actuaciones con bisagras o un proyecto basado en precisión (ejemplo,arriba, una plataforma Stewart, o equipo de prueba científica). No abordaremos la precisión en este artículo; Si está diseñando una aplicación de precisión, recomendamos comenzar con nuestro Tutoriales de actuador controlado por Arduino
Las aplicaciones verticales de elevación y diapositivas horizontales son las más simples de planificar: todo es paralelo, por lo que no hay cálculos adicionales para obtener sus clasificaciones de accidente cerebrovascular y peso, solo adición y resta de simple adición.
Ascensores verticales
Uno de los más directo Aplicaciones es un elevador de electrodomésticos de cocina o un elevador desplegable: ¡estos proyectos son lo suficientemente comunes como para hacer un kit de actuador casi todo en uno para ello! Los ascensores de los electrodomésticos son solo Capaz de moverse en una línea vertical, con un soporte sustancial del marco de acero telescópico.
Uno de los más ampliamente utilizado Aplicaciones de elevación vertical para nuestros actuadores es el Limitable Camper Van Bed. Esta operación es un movimiento vertical directo, generalmente extendido a través de 2-4 actuadores, y con un requisito para un movimiento unifonizado uniforme.
Ambos proyectos anteriores usan el mismo principio, al igual que el ejemplo a continuación. El actuador está moviendo algo dentro o fuera del camino, en un movimiento recto, simple y vertical. El único funcional Las diferencias entre los proyectos son la posición del actuador en relación con el objeto en movimiento: la mayoría de los elevadores de la cama tienen actuadores debajo el objeto; La mayoría de los ascensores de electrodomésticos estarán debajo y detrás de, y otros incluso pueden ser arriba o adyacente a el objeto en movimiento. En algunas aplicaciones particulares, se puede usar una polea. Mientras ni el solenoide ni el objeto en movimiento está obstruido y las conexiones montadas son sólidas, la operación funcionará.
Para este ejemplo, fingiremos que tenemos un Ventana de paso de 20 " que debe ser tirado arriba y fuera del camino para su uso. La ventana es de 25 libras, incluido el marco. La ventana está en pistas. Necesitamos tener más de 25 libras de empuje/tirón, y al menos un actuador (s) de 20 ".

Los actuadores en esta operación se pueden montar verticalmente en cualquier orientación. En la foto de arriba, una unidad tiene la barra arriba y uno abajo. Los puntos rojos representan los soportes o accesorios necesarios para el movimiento. Esta operación podría usar dos sincronizado Actuadores, montados en paralelo, para garantizar e incluso el movimiento de la ventana. Esta operación podría también hacer un solo actuador, por encima de la ventana, tirando del centro: la ventana necesitaría estar equilibrada lo suficientemente bien como para no atar durante la operación. Si esto es una preocupación, recomendamos usar una diapositiva de riel, diapositiva de cajón u otra guía lineal para garantizar un movimiento de no vinculación.
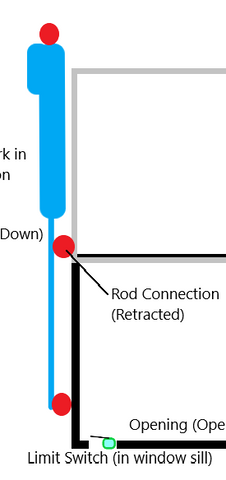
A continuación, el movimiento real. Esta ventana mide 20 "de altura. Usando un Actuador lineal premium para este ejemplo; Al momento de escribir, tenemos una opción de trazo de 18 "y una opción de trazo de 24", ¿cuál deberíamos elegir? El golpe del actuador es el cantidad máxima de movimiento Puedes obtener de la unidad. Puede siempre restringir el movimiento aún más con los interruptores de límite externos. Para nuestro ejemplo de 20 ", un 18" solenoide dejaría 2 "de la ventana Dentro de la apertura. Una unidad de 24 ", aunque más larga, puede limitarse a los 20" que requerimos, sin demasiado extra consideración. No queremos que los actuadores sean muertos después de que se cierre la ventana, ya que esto podría dañar la ventana, los dedos de alguien, el actuador o todo lo anterior. Recomendamos usar un interruptor de límite externo para detener la operación cuando se complete el movimiento deseado. Haga clic aquí Para obtener más información sobre la instalación y el cableado Interruptores de límite externos.
En el proyecto de ejemplo, debemos usar un interruptor de límite externo para detener el actuador en el cerrado o bajado posición. Para esto, alinearíamos la posición retraída (arriba) de la ventana con el Totalmente retraído posición del actuador; Esto usa el de la retracción Interruptor de límite interno del actuador para restringir el movimiento hacia arriba, y el interruptor de límite externo detendrá la extensión (bajando) tan pronto como la ventana se ponga en contacto con el alféizar.
Deberíamos tomar el horizontal dimensión de la ventana en cuenta para alambrado, Pero no tendrá ningún efecto en la operación.
Diapositivas horizontales
Una operación horizontal y deslizante se puede calcular de la misma manera que una operación vertical, pero los requisitos de carga cambiarán. Las operaciones horizontales comunes incluyen cajones o escaleras deslizantes, televisores ocultos de movimiento lateral o plataformas de extensión (como paneles solares desplegables).

Al automatizar un movimiento horizontal, el primer paso es crear el movimiento a automatizar. La mayoría de los proyectos usan una diapositiva de cajón o diapositivas de riel para esto. En esta aplicación, la diapositiva es de hecho Rodar el peso de la carga, por lo que elegir la guía lineal derecha o la diapositiva es primordial. Primero deberá instalar los componentes de la diapositiva lineal y asegurarse de que la moción funcione presionando la aplicación con la mano (si es posible).

Ya hemos establecido que el actuador en esta aplicación sí no Empuje el peso completo del objeto. En cambio, el actuador solo necesita superar el fricción En las guías lineales: dependiendo de lo que haya usado, este valor podría ser muy bajo. Si no puede obtener una estimación de fuerza aproximada para mover el objeto usted mismo, podría calcular la fricción/par acumulada de sus portaobjetos en función del peso del objeto en movimiento, entonces asegúrese de que el actuador exceda ese valor. La última opción es seleccionar un actuador que podría levantar verticalmente El objeto, que garantiza que moverá el objeto a través de un movimiento de deslizamiento horizontal.
Aletas o tapas con bisagras
Nuestro tercer tipo de proyecto común es una aplicación con bisagras. Realmente tenemos un calculadora para ayudar con esto, sin embargo Este artículo no dirección cómo usar la calculadora de actuador lineal. (Haga clic aquí para ver el artículo del tutorial de LAC).

Una aplicación con bisagras requiere algunos cálculos de trigonometría y físicos simples, si se realizan desde cero. Como siempre, el primer paso es definir el movimiento y garantizar que el objeto en movimiento pueda articularse de manera efectiva alrededor de la bisagra.

La aplicación ideal permite al actuador empujar el objeto en movimiento a lo largo de su camino de movimiento. El camino de movimiento de este objeto es un arco, en lugar de una línea recta, esto significa que el ángulo de ataque del actuador cambiará durante la operación, que, a su vez, significa que el Fuerza momentánea requerida cambiará a través de la operación también. En estas situaciones, el ángulo del actuador en relación con el objeto en movimiento (tapa o colgajo) es muy importante. Las posiciones de montaje afectarán este ángulo, así como la fuerza; Puede que te hayas dado cuenta de que esta aplicación tiene 3 variables que todos cambian y afectan el valor de los demás. Estas variables son la longitud del accidente cerebrovascular del actuador, la posición de montaje de objetos en relación con la articulación de la bisagra y la fuerza del actuador requerida. Se recomienda centrarse en el distancias y accidente cerebrovascular primero, luego calcule el requisito de peso para esa posición respectiva.

Cuando el colgajo/objeto está "cerrado" y el actuador se retrae, los puntos de montaje deben ser la longitud del orificio a agujero del actuador retraído, y cuando el colgajo/objeto está "abierto", estos puntos de montaje deberían ser los Longitud del actuador extendido Aparte: una carrera que es demasiado larga puede limitarse a la longitud correcta, pero una carrera que es demasiado corta no moverá el objeto por completo. La calculadora mencionada anteriormente es diseñado para ayudar con estas estimaciones. Haga clic aquí para obtener ese tutorial.

Si los puntos de montaje son Más cerca de la bisagra, la operación requerirá un Fuerza superior, actuador de más cortos. Si sus puntos de montaje están más lejos de la bisagra, podrá usar un fuerza inferior actuador con un longitud de carrera más larga. Para proyectos con bisagras, casi hay Siempre un rango de posibilidades de actuador funcional, y depende de usted determinar ¿Cuál de las opciones se ajustará mejor a su proyecto.
Es posible que se haya dado cuenta de que estamos definiendo dos puntos en un avión que hace un triángulo cuando se despliega; esta es la trigonometría que se puede usar para calcular la longitud de la carrera desde cero. Este razonamiento también puede definir Dos posibles puntos de montaje, en esta situación, cualquier lugar funcionará, pero siempre tendrán diferentes valores de carga. Un ejemplo de cómo se ve esto está a continuación.
Posición de montaje 1: Esta operación tendrá un peso más bajo de carga, como las posiciones de montaje son más cerca de la perpendicular Cuando el objeto está en la posición horizontal, que es cuando hay el la mayor parte de la carga en el actuador. La ventaja mecánica es mayor con este diseño..

Posición de montaje 2: Este diseño requerirá un Actuador de fuerza superior; Esto se debe a que el actuador está en ángulo hacia la bisagra. Esto requiere más fuerza requerida para empezar a moverse el objeto.




