Después de que haya terminado de flashear LED de manera totalmente única y maravillosa, querrá interactuar con el entorno físico. Aquí es donde entran los actuadores lineales. Si quieres mover algo, abrir algo, hacer algo, un actuador lineal es probablemente la mejor manera de hacerlo. ¿Y por qué hacer el levantamiento, moverse, girar cuando puede obtener un actuador lineal para hacer el trabajo duro?
Seguro que puede presionar un botón en un control remoto o un interruptor de balancín, pero ¿por qué no tener un sensor de movimiento o incluso un reloj en tiempo real para eventos basados en el tiempo?
Si recién llega a Arduino, es posible que no sepa que no puede conectar un motor grande a los alfileres de la placa y comenzar a moverlo. Debe usar algún mecanismo de conmutación para transportar la alta carga de corriente. Puede usar un controlador de motor o puente H, pero la forma más simple y más rápida es usar un par de relés o una placa de relé. Tiene dos opciones cuando usa un Arduino con un actuador lineal. Puede usar la placa de retransmisión para controlar la potencia que va al actuador sin información de posición, o si usa uno de los actuadores de retroalimentación de FA-PO, puede determinar la posición del eje y crear un control de posición de circuito cerrado. En este artículo nos centraremos en la opción más simple, solo utilizando los relés para controlar el actuador y sin información de posición.
Asegúrese de usar relés (o un tablero de relé) con relés SPDT. Los relés SPDT (doble tiro de un solo polo) tienen tres conexiones para cada relé. Común, normalmente abierto, normalmente cerrado. Entraremos en más detalles sobre los relevos en otro artículo, solo asegúrese de obtener relevos SPDT, de lo contrario no funcionará. Necesita dos relés SPDT para controlar el actuador. Con dos relés SPDT, puede comenzar, detener y cambiar la dirección del actuador.
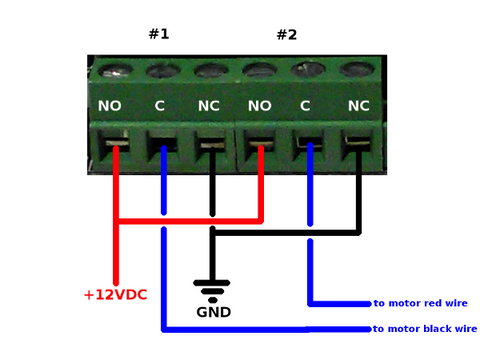
Como puede ver en el diagrama de cableado a continuación, conecte su tierra de 12 VCC al terminal normalmente cerrado de los dos relés, y conecte su +12VDC al terminal normalmente abierto de los dos relés. Puede hacer una unión para dividir cada cable en dos, o usar un cable de puente corto. Conectas los dos cables del actuador al terminal común, uno a cada relé.
Para el código Arduino, supongamos que los pines digitales 2 y 3 son para controlar los dos relés. Tendrá que verificar qué es en su tablero. Aquí hay un fragmento de código simple que muestra cómo puede extender, retraer y detener el actuador lineal.
const int RELAY_1_A = 2;
const int RELAY_1_B = 3;
void setup() {
pinMode(RELAY_1_A, OUTPUT);
pinMode(RELAY_1_B, OUTPUT);
} vacío loop() { //This is where your program logic goes //You can call the functions to control the //actuator here, as well as reading sensors, etc.. } vacío Extendactuator (En t actuador) {// establece un relé uno y el otro apagado // esto se moverá extender el actuador escribir digital(Relay_1_a, ALTO); escribir digital(Relay_1_B, BAJO); } vacío retractactuador (En t actuador) {
// establece un relé y el otro en
// esto se moverá retraer el actuador
escribir digital(Relay_1_a, BAJO);
escribir digital(Relay_1_B, ALTO);
}
vacío stopactuator (En t actuador) {
// Establecer ambos relés
// Esto detendrá al actuador en un frenado
escribir digital(Relay_1_a, BAJO);
escribir digital(Relay_1_B, BAJO); }Esto debería hacer que continúe usando un Arduino (u otro microcontrolador) con relés para controlar un Firgelli Automatización Actuador lineal.
Si está buscando con qué actuador lineal comenzar, llámenos o envíenos un correo electrónico en nuestra línea técnica. Si está buscando un actuador de caballo de batalla sólido, consulte el Actuadores lineales de la serie ligera Llevamos, o el Unidades de servicio ligero con retroalimentación de potenciómetro. No olvide un buen suministro de alimentación de 12VDC que puede manejar cargas inductivas. MB1 Brackets para actuadores lineales (MB1 para la serie FA-150) le ahorrará mucho tiempo y frustración.



