La utilización de comentarios para garantizar movimientos precisos es clave en cualquier proyecto de automatización, desde los ascensores robóticos hasta TV. La implementación adecuada de la retroalimentación permite un control preciso de circuito cerrado de su actuador lineal; Ya no necesita verificar manualmente que su actuador lineal vaya a la posición correcta. Como los actuadores lineales se usan típicamente para mover un objeto de una posición a otra, la retroalimentación más importante para recibir de su actuador es su posición. Los actuadores lineales que tienen retroalimentación posicional típicamente medirán la posición utilizando uno de los 3 sensores diferentes; Potenciómetros, sensores de efecto de pasillo y sensores ópticos.
Potenciómetros
Potenciómetros son resistencias variables que cuando se usan en actuadores lineales, su resistencia cambia en función de la posición del actuador. Los potenciómetros consistirán en los 3 pines como se muestra a continuación, el pin 1 es el voltaje de entrada, el pin 3 está molido y el pin 2 es la resistencia ajustable. Puede leer la salida de los potenciómetros midiendo el voltaje entre el pin 2 y la tierra, lo que cambiará a medida que el actuador se mueva. A efectivamente Implementar estos comentarios, deberá utilizar algún tipo de controlador, como un Arduino, para leer este valor posicional a medida que se mueve el actuador.

Una de las mayores fortalezas de un potenciómetro es que proporciona una indicación de posición absoluta del actuador lineal. Debido a esto, esta retroalimentación puede ser bastante fácil de manejar en el software de un controlador, ya que simplemente puede comparar la lectura de salida actual con la lectura de salida de su posición deseada. Tampoco tendrá que preocuparse por perder la posición de su actuador si apaga su sistema, ya que la resistencia del potenciómetro será la misma independientemente de ser alimentada o no.

Hay pocos inconvenientes del uso de potenciómetros para la retroalimentación posicional. Un inconveniente es que la retroalimentación del potenciómetro puede verse afectada por el ruido eléctrico y puede requerir que filtre la señal para lograr resultados estables. La salida del potenciómetro también depende del voltaje de entrada al potenciómetro, lo que puede dificultar que múltiples actuadores lineales se mueva simultáneamente ya que la señal de salida puede variar ligeramente debido a ligeros cambios en el voltaje de entrada. Además, los potenciómetros generalmente no serán tan sensibles a los movimientos más pequeños del actuador lineal, en comparación con las otras opciones de retroalimentación, lo que dificulta los resultados repetibles.
Sensor de efecto de pasillo
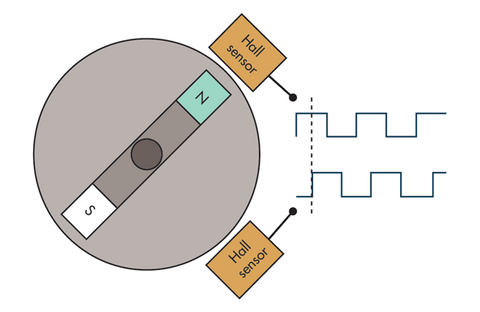
Sensores de efectos de la sala Trabajo basado en el efecto de la sala, que es el efecto de un campo magnético para producir un voltaje. Los sensores de efecto Hall pueden proporcionar una salida digital o lineal, pero para los actuadores lineales, generalmente usan sensores de efecto de salón de salida digital. Cuando estos sensores detectan un campo magnético, producirán un voltaje que puede ser leído por un controlador [1]. Con actuadores lineales, estos sensores se colocan dentro de la caja de cambios del actuador junto con un disco magnético. A medida que el actuador lineal se mueve, este disco magnético gira pasa el sensor de efecto del salón que produce un pulso de voltaje. Estos pulsos se pueden usar para determinar que tan lejos se ha movido el actuador. En general, los actuadores lineales que usan sensores de efecto Hall para proporcionar retroalimentación posicional especificarán el pulso por pulgada recorrido que puede usar para determinar hasta qué punto el actuador mueve. Por ejemplo, si detectó 6000 pulsos y su actuador tiene un pulso por pulgada recorrido de 12000, lo que significa que su actuador se ha movido 0.5 pulgadas.
La principal desventaja del uso de un sensor de efecto Hall para la retroalimentación posicional en comparación con un potenciómetro es que los sensores de efecto de pasillo no miden una posición absoluta. En su lugar, producen pulsos que se pueden contar para determinar hasta dónde se ha movido el actuador, lo que requiere que sepa dónde comienza el actuador a determinar la posición absoluta. Esto se puede superar en el software de su controlador, como en un Arduino, almacenando la posición actual del actuador y siempre comenzando el actuador desde una posición conocida, como completamente retraída. Esto puede requerir que esté en casa con el actuador a esta posición conocida cada vez que enciende su sistema.
La fuerza de usar un sensor de efecto Hall para la retroalimentación posicional es que proporciona una resolución mucho mayor en comparación con la retroalimentación de un potenciómetro. Como puede haber 1000 de pulsos por pulgada de movimiento, los sensores de efectos de la sala proporcionan una precisión y confiabilidad para posicionar su actuador lineal. Los pulsos también variarán en frecuencia en función de la velocidad de su actuador lineal, lo que significa que puede usarlos para medir la velocidad de su actuador lineal. Los sensores de efectos de la sala también proporcionan una mayor capacidad para garantizar que múltiples actuadores lineales se muevan juntos simultáneamente, ya que los recuentos de pulso son más precisos que el voltaje cambiante del potenciómetro. Utilizando nuestro Controlador de actuador FA-Sync-X, incluso puede asegurarse de que los actuadores se muevan al unísono, independientemente de la carga.
Sensor óptico
Sensores ópticos que se utilizan en actuadores lineales (hay otro tipo de sensores ópticos) que funcionan muy similares a los sensores de efecto salón, excepto que detectan la luz usando un fotodetector [2]. Los sensores ópticos funcionan teniendo luz de un LED o alguna otra fuente de luz se transfiren a través de un disco de codificador. Este disco del codificador está ranurado para permitir que la luz pase periódicamente. En el otro lado del disco está el fotodetector, que detecta la luz cuando pasa a través de las ranuras en el disco y crea una señal de salida [3]. A medida que el actuador se mueve, el disco del codificador gira y la luz es detectada por el fotodetector que produce un pulso de voltaje. Estos pulsos se pueden usar de manera similar a los pulsos de un sensor de efecto de pasillo para determinar que tan lejos se ha movido el actuador. Los actuadores lineales que usan sensores ópticos para la retroalimentación posicional también especificarán el pulso por pulgada recorrido que puede usar para determinar qué tan lejos se mueve el actuador.

Los sensores ópticos, nuevamente, tienen fortalezas y inconvenientes similares para los sensores de efectos de la sala en comparación con los potenciómetros. Tienen una mayor precisión y resolución, incluso mayor que los sensores de efecto Hall, y pueden usarse para medir la velocidad del actuador lineal. También son mejores para garantizar que sus múltiples actuadores lineales se muevan simultáneamente y puedan utilizar el Controlador de actuador FA-Sync-X. Tampoco miden la posición absoluta y, en su lugar, requieren que cuente el pulso para determinar hasta qué punto se ha movido su actuador. También deberá comenzar en una posición conocida, ya que necesitará guardar la posición actual en el software para realizar un seguimiento de la posición absoluta.
Resumen
Su elección de tipo de comentarios que desea de su actuador lineal dependerá de lo que sienta que es más importante para su aplicación. ¿Necesita un alto nivel de precisión? Elija un actuador lineal con sensor de efecto óptico o de hall. ¿No quieres tener que configurar tu actuador en una posición de inicio cada vez que lo enciende? Luego vaya con un actuador lineal con un potenciómetro. ¿Quieres controlar múltiples actuadores lineales simultáneamente? Elija un actuador lineal con sensor de efecto óptico o de hall. ¿Desea que sus comentarios proporcionen una posición absoluta? Vaya con un actuador lineal con un potenciómetro.
[1] Monari, G. (junio de 2013) Comprensión de la resolución en codificadores ópticos y magnéticos. Recuperado de: https://www.electronicdesign.com/technologies/components/article/21798142/understanding-resolution-in-optical-and-magnetic-encoders
[2] Paschotta, R. Artículo sobre sensores ópticos. Recuperado de:https://www.rp-photonics.com/optical_sensors.html



