"একই 12 ভি বিদ্যুৎ সরবরাহের সাথে সংযুক্ত হয়ে কেন আমার অভিনেতারা সিঙ্ক্রোনাসে চলে না?"

অনেক গ্রাহক তাদের ট্রাকের হ্যাচ কভারটি স্বয়ংক্রিয়ভাবে চালানোর জন্য, ওয়াইনের আস্তরণের দিকে যাওয়ার ট্র্যাপারডোয়ারটি গোপন করার জন্য, বা একটি সক্রিয়করণের জন্য ফিগারেলি লিনিয়ার অ্যাকিউইটরের উপর নির্ভর করে একটি লাম্বোরগিনি এয়ার ব্রেক। এই প্রকল্পগুলি অর্জন করতে দুটি এচিকিউটর হ্যাচটির দুপাশে স্থাপন করা যেতে পারে এটি উপরে তুলতে, তবে কখনও কখনও কোনও গ্রাহক আমাদের জানান যে তাদের হ্যাচটি ভেঙে গেছে বা মোটরটি জ্বলিয়ে গেছে কারণ ভারপ্রাপ্ত পরিচালক একই গতিতে সরেনি।
কি হচ্ছে? ভাগ্যক্রমে আমরা আত্মবিশ্বাসের সাথে বলতে পারি যে এটি আমাদের লিনিয়ার অ্যাকিউইটরেটরের কোনও ডিজাইনের ত্রুটি নয়, বরং সমস্ত ডিসি মোটরের সহজাত সম্পত্তি। এটি আমাদের হোক বা প্রতিযোগী, দুটি ডিসি মোটর সিঙ্ক্রোনাসে কখনই পুরোপুরি সরানো যাবে না একটি এনকোডার ব্যবহার করে বন্ধ প্রতিক্রিয়া লুপ ছাড়াই একে অপরের সাথে।
এটি সহ অসংখ্য কারণ রয়েছে তবে সীমাবদ্ধ নয়:
- উত্পাদন সহনশীলতা ছোট বিভিন্ন প্রকারের জন্য অনুমতি দেয়
- প্রতিটি মোটর শ্যাফটে বিভিন্ন লোড / টর্ক প্রয়োগ করা হয়
- বুশিং / বিয়ারিং ঘর্ষণে বিভিন্নতা
- যান্ত্রিক পরিধান এবং টিয়ার মধ্যে পার্থক্য
এই ছোট পার্থক্যগুলি একসাথে মিশ্রিত হয় এবং ডিসি মোটর বা লিনিয়ার অ্যাকিউটিউটরের মধ্যে গতিতে 5-10% পার্থক্য আশা করা বাস্তবসম্মত। ভাগ্যক্রমে গতির এই সহজাত পার্থক্য কাটিয়ে উঠতে বেশ কয়েকটি পদ্ধতি রয়েছে methods
একই গতিতে লিনিয়ার অ্যাকুয়েটারগুলি কীভাবে চালানো যায়
আপনি যদি কিনেছেন (বা পরিকল্পনা করছেন) ক প্রতিক্রিয়া রড লিনিয়ার অ্যাক্টিভেটর, অপটিক্যাল প্রতিক্রিয়া রৈখিক অ্যাকিউউটার, বুলেট সিরিজ 36 Cal, বা বুলেট সিরিজ 50 ক্যাল লিনিয়ার অ্যাকিউউটার, এই বিভাগটি কীভাবে তাদের সিঙ্ক্রোনাসে স্থানান্তরিত করতে হবে সে সম্পর্কে তথ্য সরবরাহ করবে।
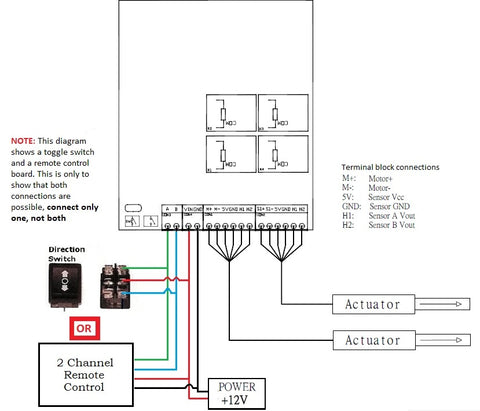
1) এফএ-সিওয়াইএনসি -4 বা এফএ-সিওয়াইএনসি -2 সিঙ্ক্রোনাস বক্স (দৃ strongly়ভাবে প্রস্তাবিত)
দ্য সিঙ্ক্রোনাস কন্ট্রোল বাক্স দুটি এবং চারটি লিনিয়ার অ্যাকিউটেটরের গতি সুসংগত করার জন্য এটি এখন পর্যন্ত সবচেয়ে নির্ভরযোগ্য পদ্ধতি। নিম্নলিখিত তালিকা থেকে একচেটিয়াভাবে আপনার একই ধরণের অ্যাকিউউটরের প্রয়োজন হবে:
- অপটিক্যাল সিরিজ 200lb অ্যাকুয়েটার
- অপটিক্যাল সিরিজ 400 এলবি অ্যাকুয়েটার
- 12 ভি বুলেট সিরিজ 36 Cal। ভারপ্রাপ্ত
- 12 ভি বুলেট সিরিজ 50 ক্যাল। ভারপ্রাপ্ত
এই কন্ট্রোল বাক্সটি "প্লাগ এবং প্লে" সমাধানটি অফ-শেল্ফ অফার করে, একবারে আপনাকে কেবল যা করতে হবে তা হল একটি বোতাম চাপুন এবং সিস্টেমটি স্বয়ংক্রিয়ভাবে ক্যালিব্রেট করবে, তারপরে আপনি স্বজ্ঞাতভাবে যেকোন অধীনে সিঙ্ক্রোনাসে 4 টি অ্যাকিউইটরেটর নিয়ন্ত্রণ করতে পারবেন ভার. দেখা এই কীভাবে এফএ-সিওয়াইএনসি -2 এবং এফএ-সিওয়াইএনসি -4 সিঙ্ক্রোনাস কন্ট্রোল বাক্সগুলি ব্যবহার করবেন সে সম্পর্কে নিবেদিত টিউটোরিয়াল
2) আরডুইনো ইন্টারপট পিনস
এই পদ্ধতিটি অপটিকাল এবং বুলেট সিরিজের সাথে কাজ করবে, এই অভিনেতাদের যথাক্রমে অপটিক্যাল এবং হল এফেক্ট এনকোডার রয়েছে। ডালের সংখ্যা গণনা করে রডের স্থানচ্যুতি গণনা করা যেতে পারে। নিয়ন্ত্রণ অ্যালগরিদম প্রয়োগ করা সিঙ্ক্রোনাস নিয়ন্ত্রণ সক্ষম করে। এটির জন্য আপনাকে এনকোডারগুলি থেকে আরডুইনোর বিঘ্নিত পিনগুলিতে সংকেত সংযোগের প্রয়োজন। এটি একটি উন্নত প্রকল্প; আমরা সফ্টওয়্যার বা প্রোগ্রামিংয়ের জন্য সমর্থন সরবরাহ করি না।
3) আরডুইনো এনালগ পিনস
এই পদ্ধতিটি শুধুমাত্র সাথে কাজ করবে প্রতিক্রিয়া রড লিনিয়ার অ্যাক্টিভেটর। প্রতিক্রিয়া রড লিনিয়ার অ্যাক্টুয়েটারের একটি ইনবিল্ট পোটেনিওমিটার রয়েছে যা একটি এনালগ আউটপুট দেয় যা পড়তে পারে এবং পজিশন পাঠ্যে রূপান্তরিত হতে পারে। আরডুইনো ব্যবহার করে এটি কীভাবে করা যায় তার একটি টিউটোরিয়াল লিঙ্কযুক্ত এখানে; এই টিউটোরিয়ালটি সম্পূর্ণরূপে, প্রোগ্রামিং এবং আরডুইনো সম্পর্কে কিছু জ্ঞান ধরে নেওয়া হয়েছে। তদুপরি, এই টিউটোরিয়ালটি কেবল সেন্সর থেকে কীভাবে পড়া যায় তা দেখায়; সিঙ্ক্রোনাস কন্ট্রোলের জন্য সফ্টওয়্যার লেখার বিষয়টি আপনার উপর নির্ভর করে। এটি একটি উন্নত প্রকল্প; আমরা সফ্টওয়্যার বা প্রোগ্রামিংয়ের জন্য সমর্থন সরবরাহ করি না।
একই গতিতে (প্রায়) লিনিয়ার অ্যাকিউটিটরগুলি কীভাবে চালানো যায়
প্রতিক্রিয়া নিয়ন্ত্রণের জন্য ইনবিল্ট এনকোডার নেই এমন লিনিয়ার অ্যাকিউটেটরগুলি কীভাবে স্থানান্তরিত করা যায় সে সম্পর্কে এই বিভাগটি যাবে। আপনি যদি এখনও আপনার লিনিয়ার অ্যাকিউটিটরগুলি না কিনে থাকেন তবে আমরা এই বিভাগটি এড়িয়ে যাওয়া এবং পূর্ববর্তী বিভাগে ইনবিল্ট পজিশনাল এনকোডারগুলির সাথে ফিগারেলি লিনিয়ার অ্যাকুয়িটর ব্যবহার করে এমন পদ্ধতিগুলির সাথে স্টিক করার পরামর্শ দিই। তবে আপনি যদি ইতিমধ্যে একটি লিনিয়ার অ্যাকিউউটার কিনে থাকেন তবে এই ইনবিল্ট পজিশনাল এনকোডার যেমন নেই ফির্গেলি ক্লাসিক বা ফিগারেলি প্রিমিয়াম লিনিয়ার অ্যাকিউটিউটর এবং এখনও তাদের (প্রায়) একই গতিতে সরাতে চান, এই বিভাগটি পড়া চালিয়ে যান।
বিঃদ্রঃ: আমরা একই গতি বলছি (প্রায়) কারণ বন্ধ লুপের প্রতিক্রিয়া নিয়ন্ত্রণ ছাড়াই অ্যাকিউইটরেটরকে একই গতিতে সরানো শারীরিকভাবে অসম্ভব।
1) কিছুই করবেন না
সবচেয়ে সহজ সমাধানটি গতির 5-10% পার্থক্য সম্পর্কে উদ্বিগ্ন না হওয়ার কারণ হতে পারে, বিশেষত যদি আপনার অ্যাক্টুয়েটারের স্ট্রোক ছোট হয় (<6 ইঞ্চি), কারণ তারা উচ্চতার চেয়ে খুব বেশি আলাদা করে না। পরিবর্তে আপনার সিস্টেমে কিছুটা নমনীয়তা প্রবর্তন করুন, উদাহরণস্বরূপ আপনি যদি দুটি অ্যাকুয়েটরের সাহায্যে একটি হ্যাচ তৈরি করে থাকেন তবে আপনি এটি এমনভাবে নকশা করতে পারেন যাতে হ্যাচটির শরীরটি কিছুটা ঘোরানো / মোচড় দিতে পারে যাতে অ্যাকুয়েটরের গতির কোনও পার্থক্য সিস্টেমের দ্বারা শোষিত হয়।
2) গতি নিয়ামক
যদি একজন অ্যাকিউউটর দ্বিতীয়টির চেয়ে দ্রুত চলে যায় তবে আপনি এ ব্যবহার করতে পারেন গতি নিয়ামক এর গতি হ্রাস করতে দ্রুত অ্যাকিউটরেটে। এই কন্ট্রোল বাক্সটিতে একজন অ্যাকুয়েটর যে গতিবেগ নিয়ে যায় তার গতি সামঞ্জস্য করতে পালস প্রস্থের মোডুলেশন (PWM) ব্যবহার করে uses আরও তথ্যের জন্য আমাদের টিউটোরিয়াল দেখুন: ফির্গেলি লিনিয়ার অ্যাকিউটেটরগুলির সাথে কীভাবে স্পিড কন্ট্রোলার ব্যবহার করবেন। গতি টিউন করা একটি শিল্প ফর্ম এবং একাধিক অ্যাকিউইটরেটরের মধ্যে নিখুঁত গতির সাথে মিলবে না, তবে প্রতিক্রিয়া ব্যবহার না করার সময় এটি সবচেয়ে ভাল ফলাফল।
3) আরডুইনো স্পিড কন্ট্রোল
আমাদের শেল্ফ স্পিড কন্ট্রোলারটি ব্যবহার না করে আপনি পিডাব্লুএম সংকেত ব্যবহার করে অ্যাকিউইটরেটের গতি পরিবর্তনের জন্য একটি আরডুইনো ব্যবহার করতে পারেন। আপনার যদি ইতিমধ্যে আরডিনো নিয়ে অভিজ্ঞতা না থাকে তবে আমরা এই পদ্ধতিটিকে উত্সাহিত করি না। যদিও ফিরগেলি আরডুইনো বা প্রোগ্রামিং সমর্থন সরবরাহ করে না তবে আমাদের ওভারভিউ টিউটোরিয়াল রয়েছে have একটি আরডুইনো এবং মোটর ড্রাইভার ব্যবহার করে কীভাবে গতি পরিবর্তিত হবে.



