এই উদাহরণে আমরা একটি আরডুইনো এবং মোটর ড্রাইভার সহ একটি রৈখিক অ্যাকিউটরেটরের গতি নিয়ন্ত্রণ করব।
দ্রষ্টব্য: এই টিউটোরিয়ালটি প্রাথমিক বৈদ্যুতিন নীতিগুলি, আরডুইনো হার্ডওয়্যার এবং সফ্টওয়্যার সহ পূর্ববর্তী জ্ঞান ধারণ করে। যদি এটি আপনার প্রথমবারের মতো আরডুইনো ব্যবহার করে থাকে তবে আমরা গুগল এবং ইউটিউব অনুসন্ধানের মাধ্যমে উপলব্ধ অনেক দুর্দান্ত প্রাথমিক টিউটোরিয়ালগুলির মধ্যে একটি থেকে বেসিকগুলি শিখার পরামর্শ দিই। দয়া করে সচেতন হন যে আমাদের কাছে কাস্টম অ্যাপ্লিকেশনগুলির জন্য প্রযুক্তিগত সহায়তা দেওয়ার সংস্থান নেই এবং এই সর্বজনীনভাবে উপলব্ধ টিউটোরিয়ালের বাইরে ডিবাগ, সম্পাদনা, কোড বা তারের ডায়াগ্রামগুলি করব না।
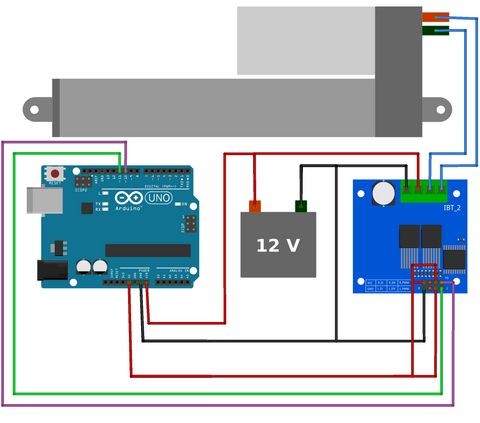
উপাদান
- 12 ভি লিনিয়ার অ্যাক্টিভেটর
- 12 ভি বিদ্যুৎ সরবরাহ
- আরডুইনো
- মোটর ড্রাইভার
- পেন্টিওমিটার (alচ্ছিক)
- সংযোগ তৈরির জন্য বৈদ্যুতিক তারগুলি এবং সরঞ্জাম বা সোল্ডারিং লোহা ক্রিম্পিংয়ের জন্য
তারের
হার্ডওয়্যার এবং সফ্টওয়্যার ওভারভিউ
লিনিয়ার অ্যাকিউটিউটরে ডিসি মোটরগুলির জন্য একটি উচ্চ স্রোতের প্রয়োজন হয় (5A পর্যন্ত), যদি আমরা সরাসরি আরডুইনোর সাথে লিনিয়ার অ্যাকুয়েটরের সাথে সংযোগ স্থাপন করি তবে এই উচ্চতর বর্তমান ড্রটি আরডুইনো ডিজিটাল পিনগুলি ধ্বংস করবে কারণ তারা কেবলমাত্র 40 এমএ জন্য রেট দেওয়া হয়। অতএব আমরা একটি মোটর ড্রাইভার ব্যবহার করি যা আরডুইনো বোর্ডের থেকে কম বর্তমান পিডব্লিউএম (পালস প্রস্থের মড্যুলেশন) সংকেত নিতে পারে এবং লিনিয়ার অ্যাকিউটরেটে একটি উচ্চ বর্তমান পিডব্লিউএম সিগন্যাল আউটপুট নিতে পারে।
মোটর চালক দুটি পিডাব্লুএম ডিজিটাল পিনের সাথে সংযুক্ত থাকে (আরডুইনো ইউনিোর পিন 10 এবং 11)। এই পিনগুলির একটি নীচে এবং অন্য এইচআইটি সেট করে (নীচের কোডে লাইন 18 এবং 19 দেখুন) আমরা সর্বোচ্চ গতিতে অ্যাকিউউটরকে প্রসারিত করতে পারি। অ্যাকিউইউটরকে থামানোর জন্য আমরা উভয় পিনগুলি নিম্নে সেট করেছিলাম (নীচের কোডে লাইন 21 এবং 22 দেখুন) এবং গতির দিকটি বিপরীতমুখী করতে আমরা HIGH এবং LOW পিনের ক্রমটি বিপরীত করতে পারি (নীচের কোডটিতে লাইন 24 এবং 25 দেখুন)। [0, 255] পরিসরের যে কোনও মানের সাথে পরিবর্তনশীল "গতি" পরিবর্তন করে আমরা গতিও সামঞ্জস্য করতে পারি; নীচের কোডটিতে লাইন 17 দেখুন।
কোড
https://gist.github.com/Will-Firgelli/c0ef0871dc1946d75257e0c29dccae2a
একটি পেন্টিওমিটার দিয়ে বিভিন্ন ধরণের গতি নিয়ন্ত্রণ
উপরের উদাহরণে আমরা কোডের 17 লাইনে ম্যানুয়ালি গতি সেট করি। তবে পরিস্থিতিগুলি এমন পরিস্থিতিতে দেখা দিতে পারে যেখানে আমরা সময় মতো অ্যাকিউটরেটারের গতি আলাদা করতে চাই। এটি অর্জনের সবচেয়ে সহজ পদ্ধতিটি কোনও পেন্টিয়োমিটার ব্যবহার করে। ক সম্ভাবনাময় হয়একটি তিনটি টার্মিনাল ভেরিয়েবল রোধকারী যা ভোল্টেজ বিভাজক হিসাবে কাজ করতে পারে। পেন্টিওমিটারের গিঁটটি আবর্তিত করে আউটপুট ভোল্টেজ পরিবর্তিত হবে এবং একটি চলক গতি সেট করতে আমরা এটি আরডুইনোর এনালগ পিনের সাথে সংযুক্ত করতে পারি।
তারের

হার্ডওয়্যার এবং সফ্টওয়্যার ওভারভিউ
উপরে উল্লিখিত হিসাবে, একটি পেন্টিওমিটার একটি ঘূর্ণমান ডিভাইস যা গিঁটটি ঘোরানোর সময় প্রতিরোধের পরিবর্তন করে। পোটিনোমিটারের দুটি বাহ্যিক পিনকে 5 ভি এবং জিএনডি এবং মধ্য পিনটি আরডুইনো এনালগ পিনের সাথে সংযুক্ত করে, এ 0, একটি ভোল্টেজ বিভাজক তৈরি করা হয়। গিঁটটি ঘোরানোর সাথে সাথে আরডুইনো [0, 1023] থেকে শুরু করে এনালগ রিডিং পড়বে।
পরিসরের মানগুলির জন্য [512, 1023] আমরা প্রকৃতিকে প্রসারিত করতে চাই এবং মানগুলির জন্য [0, 511] আমরা ভারপ্রাপ্তকে প্রত্যাহার করতে চাই, এটি একটি সহজ যদি () / অন্য 22 এবং 28 লাইনগুলিতে বিবৃতি দিয়ে অর্জন করা যায় নীচের কোড। তারপরে মানচিত্র () ফাংশন (নীচের কোডে 23 এবং 29 লাইন) ব্যবহার করে আমরা এটিকে পিডাব্লুএম সিগন্যালে রূপান্তর করতে পারি যা অ্যাকিউউটারের গতি এবং দিক উভয়ই নিয়ন্ত্রণ করে।
কোড
https://gist.github.com/Will-Firgelli/d2cdf69edc829974885984b3fb8e4856



