একটি নতুন অটোমেশন প্রকল্প ভয়ঙ্কর হতে পারে; আমরা জানি. সমস্ত প্রযুক্তিগত শর্তাদি, বৈদ্যুতিক তারের, কম্পিউটার নিয়ন্ত্রণ ইন্টারফেস এবং অন্যান্য ঘণ্টা এবং হুইসেলগুলির সাথে, এমনকি কোথায় তা জানা শক্ত হতে পারেশুরুআর! যখন অনিশ্চয়তা আপনার প্রকল্পকে অগ্রগতি থেকে বিরত রাখে, তখন বেসিকগুলিতে ফিরে আসা এবং আপনার প্রকল্পের প্রয়োজনীয়তা পর্যালোচনা করা আপনাকে এগিয়ে যাওয়ার পথ দেখাতে পারে। আমি বলতে চাই যে জ্ঞান শক্তি, কিন্তুবোঝা মুদ্রা হয়।
যখন কোনও নতুন অটোমেশন প্রকল্প শুরু করা, বা কোনও বিদ্যমান প্রকল্পে লিনিয়ার অ্যাকিউটরেটরকে রিফিট করা এবং প্রতিস্থাপন করা, এই প্রশ্নগুলি আপনাকে কোন অ্যাকিউটরেটর (গুলি) আপনার প্রকল্পের জন্য কাজ করবে তা নির্ধারণ করতে সহায়তা করবে।
- আবেদন কি?
- আপনি কি কোনও বিদ্যমান ডিজাইন বা পণ্যটিতে কোনও অ্যাকিউটরেটর রাখছেন?
- আপনি কি স্ক্র্যাচ থেকে একটি নতুন প্রকল্প ডিজাইন করছেন?
- ইউনিটে লোড কী, বা, আপনার কত শক্তি প্রয়োজন?*
- অ্যাকুয়েটর ওজন রেটিং জন্য অক্ষীয় বোঝা শুধুমাত্র। অ-রৈখিক অ্যাপ্লিকেশনগুলির জন্য (কব্জাগুলির মতো) আপনার অক্ষীয় লোড গণনা করতে হতে পারে।
- আপনার কত স্ট্রোক ('ভ্রমণ') দরকার?
- গতির প্রয়োজনীয় গতি?
- অ্যাকিউউটর চলাচলের গতি এবং ফোর্স রেটিং বিপরীতভাবে সম্পর্কিত। আবেদনের উপর নির্ভর করে আপনার পছন্দসই গতি বা আপনি যে শক্তি চান তার মধ্যে বেছে নিতে হবে।
- পরিচালনা করার জন্য আপনার কতবার প্রয়োজন?
- আমরা 5 মিনিটে শুল্ক চক্র গণনা করি অবিচ্ছিন্ন ব্যবহার (ভিতরে গতি); বেশিরভাগ অ-শিল্প অ্যাপ্লিকেশনগুলিকে শুল্ক চক্র বিবেচনা করার দরকার নেই।
- অন্যান্য শর্তগুলো?
- সংঘর্ষ-সুরক্ষা, প্রশমিত গতি বা পরিবর্তনশীল গতি নিয়ন্ত্রণের মতো বৈশিষ্ট্যগুলি অতিরিক্ত উপাদানগুলির সাথে অন্তর্ভুক্ত করা যেতে পারে।
- অন্যান্য ফাংশনগুলি কখনও কখনও রিলে, নিয়ন্ত্রণ স্কিমগুলি এবং সৃজনশীল তারের সাহায্যে সম্পন্ন করা যায়।
উপরের সমস্ত মানদণ্ডগুলি একবার বোঝা গেলে আপনি উপাদানগুলি থেকে আপনার সিস্টেমটি তৈরি করতে প্রস্তুত। একটি বেসিক অ্যাকুয়েটর সিস্টেমের জন্য এই অংশগুলির প্রয়োজন:
- অ্যাকিউউটর (গুলি) & মাউন্টিং বন্ধনী - বন্ধনীগুলি অ্যাকুয়েটর-নির্দিষ্ট। সঠিক বন্ধনীগুলির জন্য পণ্য পৃষ্ঠাগুলি দেখুন
- নিয়ন্ত্রণ (স্যুইচ বা রিমোট বা পিএলসি)
- সিস্টেমের নিয়ন্ত্রণ অংশের জন্য দায়ী মেরুতা স্যুইচিং মোটর সার্কিটের, যা নিয়ন্ত্রণ করে অ্যাকিউউটর গতির দিকনির্দেশনা.
- সর্বাধিক বিধিনিষেধ, শর্ত এবং প্রয়োজনীয়তা একটি স্বয়ংক্রিয় সিস্টেমের জন্য নিয়ন্ত্রণ প্রকল্পের সাথে জড়িত।
- বাহ্যিক সিস্টেমের সাথে ইন্টারফেসিং জটিলতার বিভিন্ন স্তরে নিয়ন্ত্রণ উপাদানগুলি দিয়ে করা যেতে পারে।
- শক্তির উৎস - (আপনার অ্যাকিউটিউটরগুলির ক্রমবর্ধমান অ্যাম্পেরেজ অঙ্কন অতিক্রম করুন)
- সবচেয়ে সহজ সিস্টেমটি হ'ল সিএসপিএস তারযুক্ত শক্তি এবং নিয়ন্ত্রণ সিস্টেম, প্লাস এক অ্যাকুয়েটর (একটি 5 এ ড্র সহ)।

পরবর্তী, আপনার সময় নির্ধারণ করার সময় সর্বাধিক গুরুত্বপূর্ণ প্রয়োজনীয়তা। আমরা বেশিরভাগ প্রকল্পগুলি নিম্নলিখিত বিভাগগুলির মধ্যে একটিতে ফিট দেখতে পাই: উল্লম্ব উত্তোলন/লোয়ারিং, অনুভূমিক স্লাইডিং মোশন, কব্জিযুক্ত ক্রিয়াকলাপ বা একটি নির্ভুলতা ভিত্তিক প্রকল্প (উদাহরণ,উপরে, একটি স্টুয়ার্ট প্ল্যাটফর্ম, বা বৈজ্ঞানিক পরীক্ষার সরঞ্জাম)। আমরা এই নিবন্ধে নির্ভুলতার সমাধান করব না; আপনি যদি একটি নির্ভুল অ্যাপ্লিকেশন ডিজাইন করছেন তবে আমরা আমাদের সাথে শুরু করার পরামর্শ দিই আরডুইনো-নিয়ন্ত্রিত অ্যাকুয়েটর টিউটোরিয়াল
উল্লম্ব উত্তোলন এবং অনুভূমিক স্লাইড অ্যাপ্লিকেশনগুলি পরিকল্পনার সহজতম - সবকিছু সমান্তরাল, সুতরাং আপনার স্ট্রোক এবং ওজন রেটিংগুলি পাওয়ার জন্য কোনও অতিরিক্ত গণনা নেই - কেবল সাধারণ সংযোজন এবং বিয়োগফল।
উল্লম্ব লিফট
অন্যতম সোজা-ফরোয়ার্ড অ্যাপ্লিকেশনগুলি একটি কিচেন অ্যাপ্লায়েন্স লিফট বা ড্রপ ডাউন লিফট-এই প্রকল্পগুলি যথেষ্ট সাধারণ যে আমরা এটির জন্য প্রায় সমস্ত ইন-ওয়ান অ্যাকুয়েটর কিট তৈরি করেছি! রান্নাঘরের সরঞ্জাম লিফট হয় কেবল টেলিস্কোপিক স্টিল ফ্রেমের যথেষ্ট সমর্থন সহ একটি উল্লম্ব লাইনে চলতে সক্ষম।
অন্যতম বহুল ব্যবহৃত আমাদের অ্যাকিউটিউটরদের জন্য উল্লম্ব উত্তোলন অ্যাপ্লিকেশনগুলি হ'ল ক্যাম্পার ভ্যান বিছানা লিফট। এই অপারেশনটি একটি প্রত্যক্ষ উল্লম্ব গতি, সাধারণত 2-4 অ্যাকুয়েটরগুলিতে ছড়িয়ে পড়ে এবং এমনকি এমনকি সিঙ্ক্রোনাইজড গতির জন্য প্রয়োজনীয়তার সাথে।
উপরের উভয় প্রকল্পই একই নীতি ব্যবহার করে, নীচের উদাহরণগুলির মতো। অ্যাকুয়েটরটি কোনও সরল, সাধারণ, উল্লম্ব গতিতে কিছু পথের বাইরে বা বাইরে সরিয়ে নিচ্ছে। একমাত্র কার্যকরী প্রকল্পগুলির মধ্যে পার্থক্যগুলি চলন্ত বস্তুর সাথে সম্পর্কিত অ্যাকুয়েটর পজিশন - বেশিরভাগ বিছানা লিফটে অ্যাকিউটিউটর রয়েছে নিম্নদেশে বস্তু; বেশিরভাগ রান্নাঘর অ্যাপ্লায়েন্স লিফটগুলি নীচে থাকবে এবং পিছনে, এবং অন্যরা এমনকি হতে পারে উপরে বা সংলগ্ন চলমান বস্তু। কিছু নির্দিষ্ট অ্যাপ্লিকেশনগুলিতে, একটি পুলি ব্যবহার করা যেতে পারে। যতক্ষণ না অ্যাকিউউটর না চলমান বস্তু বাধা হয়, এবং মাউন্ট করা সংযোগগুলি শক্ত, অপারেশন কাজ করবে।
এই উদাহরণ হিসাবে, আমরা ভান করব আমাদের একটি আছে 20 "পাস-মাধ্যমে উইন্ডো যে টানতে হবে আপ এবং ব্যবহারের উপায়ের বাইরে। উইন্ডোটি ফ্রেম সহ 25 পাউন্ড। উইন্ডোটি ট্র্যাকগুলিতে রয়েছে। আমাদের দরকার আরও 25 পাউন্ড পুশ/টান এবং কমপক্ষে একটি 20 "স্ট্রোক অ্যাকুয়েটর (গুলি)।

এই অপারেশনে অ্যাকুয়েটর (গুলি) উভয় দিকের ক্ষেত্রে উল্লম্বভাবে মাউন্ট করা যেতে পারে। উপরের ছবিতে, একটি ইউনিটে রড রয়েছে আপ এবং এক নিচে। লাল বিন্দুগুলি গতির জন্য প্রয়োজনীয় বন্ধনী বা সংযুক্তিগুলি উপস্থাপন করে। এই অপারেশন দুটি ব্যবহার করতে পারে সিঙ্ক্রোনাইজড উইন্ডোটির এমনকি গতি নিশ্চিত করতে এবং সমান্তরালভাবে মাউন্ট করা অ্যাকিউটরেটর। এই অপারেশন পারে এছাড়াও কেন্দ্র থেকে টানতে উইন্ডোটির উপরে একটি একক অ্যাকুয়েটর দ্বারা সম্পন্ন করুন - উইন্ডোটি যথেষ্ট পরিমাণে সুষম হওয়া দরকার না অপারেশন চলাকালীন বাইন্ড। যদি এটি উদ্বেগজনক হয় তবে আমরা একটি নন-বাধ্যতামূলক গতি নিশ্চিত করতে একটি রেল স্লাইড, ড্রয়ার স্লাইড বা অন্যান্য লিনিয়ার গাইড ব্যবহার করার পরামর্শ দিই।
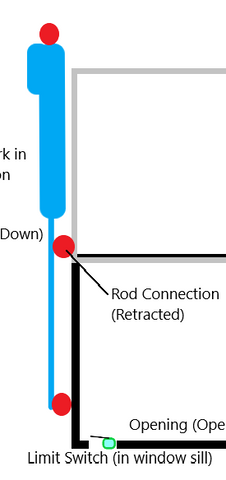
পরবর্তী, আসল গতি। এই উইন্ডোটি 20 "লম্বা। ব্যবহার করে একটি প্রিমিয়াম লিনিয়ার অ্যাকুয়েটর এই উদাহরণের জন্য; লেখার সময়, আমাদের কাছে একটি 18 "স্ট্রোক বিকল্প রয়েছে এবং একটি 24" স্ট্রোক বিকল্প রয়েছে - আমাদের কোনটি বেছে নেওয়া উচিত? অ্যাকুয়েটরের স্ট্রোক হ'ল গতি সর্বাধিক পরিমাণ আপনি ইউনিট থেকে পেতে পারেন। আপনি পারেন সর্বদা বাহ্যিক সীমা সুইচগুলির সাথে গতি আরও সীমাবদ্ধ করুন। আমাদের 20 "উদাহরণের জন্য, একটি 18" অ্যাকিউউটর উইন্ডো 2 "ছেড়ে যাবে খোলার ভিতরে। একটি 24 "ইউনিট, দীর্ঘতর হলেও, খুব বেশি ছাড়াই আমাদের প্রয়োজন 20" এর মধ্যে সীমাবদ্ধ থাকতে পারে অতিরিক্ত বিবেচনা। উইন্ডোটি বন্ধ হওয়ার পরে আমরা অ্যাকিউটরেটরগুলি মৃত-ড্রাইভ করতে চাই না, কারণ এটি উইন্ডোটি, কারও আঙ্গুলগুলি, অ্যাকিউউটর বা উপরের সমস্তগুলি আঘাত করতে পারে। কাঙ্ক্ষিত গতি সম্পূর্ণ হলে আমরা অপারেশন বন্ধ করতে একটি বাহ্যিক সীমা স্যুইচ ব্যবহার করার পরামর্শ দেব। এখানে ক্লিক করুন ইনস্টল করা এবং তারের সম্পর্কে আরও তথ্যের জন্য বাহ্যিক সীমা সুইচ।
উদাহরণস্বরূপ প্রকল্পে, আমাদের উপর অ্যাকিউউটর বন্ধ করতে একটি বাহ্যিক সীমা সুইচ ব্যবহার করা উচিত বন্ধ বা কম অবস্থান। এর জন্য, আমরা উইন্ডোটির সাথে প্রত্যাহার (আপ) অবস্থানটি লাইন করব সম্পূর্ণ প্রত্যাহার অ্যাকিউউটরের অবস্থান; এটি ব্যবহার করে প্রত্যাহার-পক্ষ গতি সীমাবদ্ধ করতে অ্যাকিউউটরের অভ্যন্তরীণ সীমা স্যুইচ উপরের দিকে, এবং বাহ্যিক সীমা স্যুইচটি উইন্ডোটি সিলের সাথে যোগাযোগ করার সাথে সাথে এক্সটেনশন (কম) বন্ধ করবে।
আমাদের নেওয়া উচিত অনুভূমিক অ্যাকাউন্টে উইন্ডোটির মাত্রা তারের, তবে এটির অপারেশনে কোনও প্রভাব পড়বে না।
অনুভূমিক স্লাইড
একটি অনুভূমিক, স্লাইডিং অপারেশন উল্লম্ব ক্রিয়াকলাপের মতো একইভাবে গণনা করা যেতে পারে তবে লোডের প্রয়োজনীয়তা পরিবর্তন হবে। সাধারণ অনুভূমিক ক্রিয়াকলাপগুলির মধ্যে রয়েছে স্লাইড-আউট ড্রয়ার বা সিঁড়ি, পার্শ্ব-চলমান লুকানো টিভি, বা প্ল্যাটফর্মগুলি (যেমন স্থাপনযোগ্য সৌর প্যানেল)।

একটি অনুভূমিক গতি স্বয়ংক্রিয় করার সময়, প্রথম পদক্ষেপটি স্বয়ংক্রিয় হওয়ার গতি তৈরি করা। বেশিরভাগ প্রকল্প এটির জন্য একটি ড্রয়ার স্লাইড বা রেল স্লাইড ব্যবহার করে। এই অ্যাপ্লিকেশনটিতে, স্লাইডটি হয় আসলে লোড ওজন বহন করা, সুতরাং সঠিক লিনিয়ার গাইড বা স্লাইড নির্বাচন করা সর্বজনীন। আপনি প্রথমে লিনিয়ার স্লাইড উপাদানগুলি ইনস্টল করতে চাইবেন এবং আপনার হাত দিয়ে অ্যাপ্লিকেশনটি চাপিয়ে (সম্ভব হলে) গতিটি কাজ করে তা নিশ্চিত করতে চাইবেন।

আমরা ইতিমধ্যে প্রতিষ্ঠিত করেছি যে এই অ্যাপ্লিকেশনটিতে অ্যাকিউউটরটি করে না বস্তুর পুরো ওজন চাপুন। পরিবর্তে, অ্যাকুয়েটরকে কেবল কাটিয়ে উঠতে হবে ঘর্ষণ লিনিয়ার গাইডগুলিতে - আপনি যা ব্যবহার করেছেন তার উপর নির্ভর করে এই মানটি খুব কম হতে পারে। আপনি যদি অবজেক্টটি নিজেই সরিয়ে নেওয়ার মাধ্যমে আনুমানিক শক্তি-অনুমান পেতে না পারেন তবে আপনি চলমান বস্তুর ওজনের উপর ভিত্তি করে আপনার স্লাইডগুলির ক্রমবর্ধমান ঘর্ষণ/টর্ক গণনা করতে পারেন, তবে নিশ্চিত করুন যে অ্যাকুয়েটর সেই মানটি ছাড়িয়ে গেছে। শেষ বিকল্পটি হ'ল একটি অ্যাকুয়েটর নির্বাচন করা পারে উল্লম্বভাবে উত্তোলন অবজেক্টটি, যা গ্যারান্টি দেয় যে এটি একটি অনুভূমিক স্লাইডিং গতির মাধ্যমে বস্তুটিকে সরিয়ে দেবে।
কব্জি ফ্ল্যাপ বা ids াকনা
আমাদের তৃতীয় সাধারণ প্রকল্পের ধরণটি একটি কব্জিযুক্ত অ্যাপ্লিকেশন। আমরা আসলে একটি ক্যালকুলেটর এই সাহায্য করার জন্য - তবে এই নিবন্ধটি হবে না লিনিয়ার অ্যাকুয়েটর ক্যালকুলেটর কীভাবে ব্যবহার করবেন তা সম্বোধন করুন. (ল্যাক টিউটোরিয়াল নিবন্ধের জন্য এখানে ক্লিক করুন).

একটি কব্জিযুক্ত অ্যাপ্লিকেশনটির জন্য কিছু ত্রিকোণমিতি এবং সাধারণ পদার্থবিজ্ঞানের গণনা প্রয়োজন, যদি স্ক্র্যাচ থেকে করা হয়। সর্বদা হিসাবে, প্রথম পদক্ষেপটি হ'ল গতিটি সংজ্ঞায়িত করা এবং চলমান অবজেক্টটি কব্জির চারপাশে কার্যকরভাবে স্পষ্টভাবে বলতে পারে তা নিশ্চিত করা।

আদর্শ অ্যাপ্লিকেশনটি অ্যাকুয়েটরকে চলন্ত বস্তুটিকে গতির পথের সাথে ঠেলে দিতে দেয়। এই অবজেক্টের গতির পথটি একটি সরলরেখার চেয়ে বরং একটি চাপ - এর অর্থ হ'ল অ্যাকুয়েটরের আক্রমণাত্মক কোণ পরিবর্তন হবে অপারেশন চলাকালীন - যার পরিবর্তে, এর অর্থ ক্ষণিকের প্রয়োজনীয় শক্তি অপারেশন মাধ্যমেও পরিবর্তন হবে। এই পরিস্থিতিতে, চলন্ত অবজেক্টের (id াকনা বা ফ্ল্যাপ) সম্পর্কিত অ্যাকিউউটরের কোণটি অত্যন্ত গুরুত্বপূর্ণ। মাউন্টিং অবস্থানগুলি এই কোণ, পাশাপাশি বলকে প্রভাবিত করবে; আপনি বুঝতে পারেন যে এটি এই আবেদন আছে 3 ভেরিয়েবল যে সমস্ত পরিবর্তন এবং অন্যের মান প্রভাবিত করে। এই ভেরিয়েবলগুলি হ'ল অ্যাকুয়েটর স্ট্রোকের দৈর্ঘ্য, কব্জা জয়েন্টের সাথে সম্পর্কিত অবজেক্ট-মাউন্টিং অবস্থান এবং প্রয়োজনীয় অ্যাকুয়েটর ফোর্স। এটি ফোকাস করার জন্য সুপারিশ করা হয় প্রথম দূরত্ব এবং স্ট্রোক, তারপরে গণনা করুন ওজন প্রয়োজনীয়তা যে নিজ নিজ অবস্থানের জন্য।

যখন ফ্ল্যাপ/অবজেক্টটি ‘বন্ধ’ হয় এবং অ্যাকিউটরেটরটি প্রত্যাহার করা হয়, তখন মাউন্টিং পয়েন্টগুলি প্রত্যাহার করা অ্যাকুয়েটরের গর্ত থেকে গর্তের দৈর্ঘ্য হওয়া উচিত এবং যখন ফ্ল্যাপ/অবজেক্টটি ‘খোলা’ করা হয়, তখন এই মাউন্টিং পয়েন্টগুলি হওয়া উচিত বর্ধিত অ্যাকুয়েটর দৈর্ঘ্য বাদে - একটি স্ট্রোক যা খুব দীর্ঘ হয় তা সঠিক দৈর্ঘ্যের মধ্যে সীমাবদ্ধ থাকতে পারে তবে একটি স্ট্রোক যা খুব কম তা বস্তুটি পুরোপুরি সরিয়ে নেবে না। পূর্বে উল্লিখিত ক্যালকুলেটরটি হ'ল পরিকল্পিত এই অনুমানগুলি সাহায্য করার জন্য। এই টিউটোরিয়ালটির জন্য এখানে ক্লিক করুন।

যদি মাউন্টিং পয়েন্টগুলি হয় কব্জা কাছাকাছি, অপারেশনটির প্রয়োজন হবে উচ্চতর শক্তি, সংক্ষিপ্ত-স্ট্রোক অ্যাকুয়েটর। যদি আপনার মাউন্টিং পয়েন্টগুলি কব্জাগুলি থেকে আরও থাকে তবে আপনি একটি ব্যবহার করতে সক্ষম হবেন নিম্ন শক্তি অ্যাকুয়েটর ক দীর্ঘ স্ট্রোক দৈর্ঘ্য। কব্জি প্রকল্পগুলির জন্য, প্রায় আছে সর্বদা একটি পরিসীমা কার্যকরী অ্যাকুয়েটর সম্ভাবনার, এবং এটি নির্ধারণ করা আপনার উপর নির্ভর করে কোন বিকল্প আপনার প্রকল্পটি সেরা ফিট করবে।
আপনি বুঝতে পেরেছেন যে আমরা একটি বিমানটিতে দুটি পয়েন্ট সংজ্ঞায়িত করছি যা মোতায়েন করার সময় একটি ত্রিভুজ তৈরি করে - এটি ট্রিগনোমেট্রি যা স্ক্র্যাচ থেকে স্ট্রোকের দৈর্ঘ্য গণনা করতে ব্যবহার করা যেতে পারে। এই যুক্তিও সংজ্ঞায়িত করতে পারে দুটি সম্ভাব্য মাউন্টিং পয়েন্ট, এই পরিস্থিতিতে, উভয় অবস্থান কাজ করবে, তবে তারা সর্বদা থাকবে বিভিন্ন লোড মান। এটি দেখতে কেমন লাগে তার একটি উদাহরণ নীচে।
মাউন্টিং অবস্থান 1: এই অপারেশন একটি হবে কম লোড ওজন, মাউন্টিং অবস্থান যেমন হয় লম্ব কাছাকাছি যখন অবজেক্টটি অনুভূমিক অবস্থানে থাকে, যা সেখানে থাকে সর্বাধিক বোঝা অ্যাকুয়েটরে। এই নকশার সাথে যান্ত্রিক সুবিধা বেশি.

মাউন্টিং অবস্থান 2: এই লেআউটটির প্রয়োজন হবে উচ্চতর বাহিনী অ্যাকুয়েটর; এটি কারণ অ্যাকুয়েটর কোণে দিকে কব্জা। এটি প্রয়োজনীয় আরও শক্তি প্রয়োজন চলন্ত শুরু করুন অবজেক্ট।




