লিনিয়ার অ্যাকুয়েটর গতি নিয়ন্ত্রণ

লিনিয়ার অ্যাকিউটিউটররা স্বাস্থ্যসেবা, উত্পাদন, কৃষি, অন্যদের মধ্যে স্বয়ংচালিত সহ বিভিন্ন খাতের মধ্যে ক্রিয়াকলাপে গুরুত্বপূর্ণ ভূমিকা পালন করে; সুতরাং বৃহত্তর নির্ভুলতা এবং নির্ভুলতার প্রয়োজন প্রয়োজনীয়। লিনিয়ার অ্যাকুয়েটর স্পিড কন্ট্রোলাররা অ্যাপ্লিকেশন প্রয়োজনীয়তা অনুসারে কাঙ্ক্ষিত বেগের গতি নিয়ন্ত্রণ করতে অনুকূল নিয়ন্ত্রণ ব্যবস্থা সরবরাহ করে।
লিনিয়ার অ্যাকুয়েটর স্পিড কন্ট্রোলারগুলির প্রধান ফাংশনগুলি এখনও সর্বাধিক শক্তি আউটপুট ক্ষমতাতে লোডের প্রয়োজনীয়তাগুলিকে সামঞ্জস্য করার সময় বৈদ্যুতিক মোটর বা অ্যাকুয়েটরকে সরবরাহ করা ভোল্টেজ ইনপুট নিয়ন্ত্রণ করে - এইভাবে গতিশীল সিস্টেমগুলির মধ্যে বৃহত্তর দক্ষতা নিশ্চিত করে।
লিনিয়ার অ্যাকুয়েটরের গতি নিয়ন্ত্রণ করার জন্য একটি বেগ নিয়ন্ত্রণ লুপ বাস্তবায়নের মতো পরিশীলিত প্রক্রিয়াগুলির প্রয়োজন হয় যা এম্বেডেড সেন্সরগুলি থেকে প্রাপ্ত প্রতিক্রিয়া লুপগুলি জড়িত যা অবস্থান বা বেগের পরিবর্তনগুলি সনাক্ত করে-এটি ক্রমাঙ্কণের মাধ্যমে সর্বোত্তম ফলাফলগুলি উত্পাদন করতে সহায়তা করে। FIRGELLIএর অ্যাকুয়েটর কন্ট্রোল বোর্ডের নিজস্ব বিল্ট-ইন স্পিড কন্ট্রোল ফিডব্যাক লুপ বৈশিষ্ট্যযুক্ত যা আপনার সিস্টেমের অগ্রগতির জন্য সুনির্দিষ্ট আন্দোলন নিশ্চিত করার সময় অপারেশনের জন্য সর্বোত্তম শর্তাদি প্রতিষ্ঠা করে।

FIRGELLIএর অ্যাকুয়েটর কন্ট্রোল বোর্ডের নিজস্ব বিল্ট-ইন স্পিড কন্ট্রোল ফিডব্যাক লুপ রয়েছে যদি আপনার খুব সঠিকভাবে গতি নিয়ন্ত্রণের জন্য একটি প্রতিক্রিয়া বন্ধ লুপ সিস্টেমের প্রয়োজন হয়। এই কন্ট্রোল বাক্সটি লিনিয়ার অ্যাকিউটিউটরগুলির সাথে ব্যবহার করা যেতে পারে যা প্রতিক্রিয়া সেন্সরগুলিতে তৈরি করেছে, হল সেন্স্রো বা অপটিক্যাল সেন্সর হিসাবে সোচ, কারণ অ্যাকুয়েটারের গতি পরিমাপ করতে এই সেন্সরগুলির প্রয়োজন।
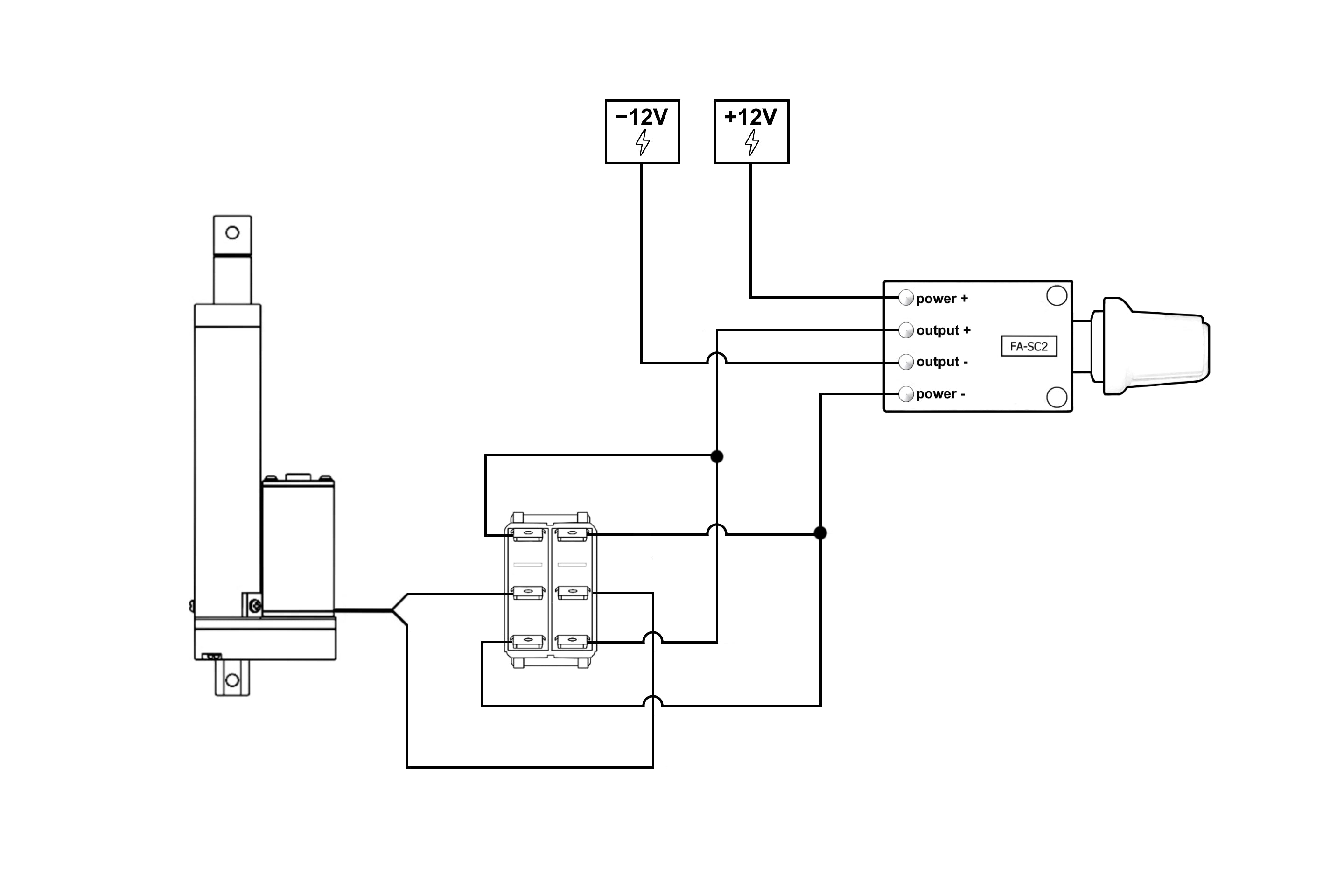
নির্ভুলতা নিশ্চিত করতে এবং ত্রুটিগুলি এড়াতে, স্পিড কন্ট্রোলারদের দ্বারা পরিচালিত লিনিয়ার অ্যাকিউটিউটররা ক্রমাগত তাদের বেগ পর্যবেক্ষণ এবং পুনর্নির্মাণের জন্য। নিম্নলিখিত ওয়্যারিং ডায়াগ্রামটি চিত্রিত করে যে কীভাবে কোনও রকার স্যুইচ এবং অনুকূল কর্মক্ষমতা এবং নিয়ন্ত্রণের জন্য স্পিড কন্ট্রোলারের সাথে লিনিয়ার অ্যাকুয়েটরকে সংযুক্ত করা যায়।
একটি স্পিড কন্ট্রোলার এবং একটি অ্যাকুয়েটরের জন্য তারের ডায়াগ্রাম
ফিড-ফরোয়ার্ড নিয়ন্ত্রণ
লিনিয়ার অ্যাকুয়েটর এবং গতি নিয়ন্ত্রণের প্রসঙ্গে, ফিড-ফরোয়ার্ড নিয়ন্ত্রণ একটি গুরুত্বপূর্ণ ধারণা। এই পদ্ধতির এই ধারণার অধীনে কাজ করে যে, নিয়ামক হিসাবে, ব্যবহারকারী স্পিড কন্ট্রোলারের আউটপুটটি সঠিকভাবে পূর্বাভাস দিতে পারে এবং সেই অনুযায়ী কোনও প্রয়োজনীয় সামঞ্জস্য করতে পারে। গতি নিয়ন্ত্রণের জন্য একটি নিয়ন্ত্রণ লুপের প্রাথমিক উদ্দেশ্য হ'ল নির্দিষ্ট কাজের প্রয়োজনীয়তার সাথে সারিবদ্ধ করার জন্য অ্যাকিউউটরের বেগকে অনুকূল করা। শর্ত থাকে যে সমস্ত ভেরিয়েবলগুলি স্থির থাকে, ফিড-ফরোয়ার্ড নিয়ন্ত্রণ ব্যবহারকারীদের প্রতি সেকেন্ডে সেন্সর মানগুলির উপর ভিত্তি করে অ্যাকিউউটরের ডিউটি চক্র এবং এর বেগের মধ্যে সম্পর্ক সম্পর্কিত অবগত ভবিষ্যদ্বাণী করতে সক্ষম করে।
শুল্ক চক্র গণনা করে, ব্যবহারকারীরা অনুমানের ত্রুটিগুলি হ্রাস করার সময় সঠিকভাবে কাঙ্ক্ষিত বেগ অর্জন করতে পারে। এই পদ্ধতির ফলে লক্ষ্যটি পুরোপুরি ওভারশুটিং এবং অনুপস্থিতির ঝুঁকি হ্রাস করে, বা লক্ষ্য পৌঁছানোর আগে অকাল বন্ধ করে দেওয়া, এইভাবে লিনিয়ার অ্যাকুয়েটর ব্যবহারের মৌলিক উদ্দেশ্যকে ক্ষুন্ন করে।
একটি ডিসি স্পিড কন্ট্রোলার কীভাবে একটি অ্যাকিউউটরের গতি নিয়ন্ত্রণ করে
একটি ডিসি স্পিড কন্ট্রোলার যা পালস প্রস্থ মড্যুলেশন (পিডব্লিউএম) ব্যবহার করে একটি পরিশীলিত বৈদ্যুতিন ডিভাইস যা একটি এর গতি নিয়ন্ত্রণ করতে ডিজাইন করা হয়েছে ডিসি অ্যাকুয়েটর। পিডব্লিউএম এমন একটি কৌশল যা একটি ধ্রুবক ফ্রিকোয়েন্সিতে দ্রুত পাওয়ারটি চালু এবং বন্ধ করে দ্রুত স্যুইচ করে একটি ডিসি মোটর সরবরাহ করা গড় ভোল্টেজের নিয়ন্ত্রণ সক্ষম করে। প্রতিটি চক্রের মধ্যে অফ সময়ের সাথে সম্পর্কিত সময় (শুল্ক চক্র) সামঞ্জস্য করে ডিসি অ্যাকুয়েটরের গতি সংশোধন করা যেতে পারে।
পিডব্লিউএম ব্যবহার করে ডিসি স্পিড কন্ট্রোলার কীভাবে ডিসি অ্যাকিউউটরের গতি নিয়ন্ত্রণ করতে পরিচালনা করে তার একটি ওভারভিউ এখানে:
- ফ্রিকোয়েন্সি: পিডব্লিউএম কন্ট্রোলার একটি ধ্রুবক ফ্রিকোয়েন্সি স্কোয়ার ওয়েভ সিগন্যাল উত্পন্ন করে, যা পর্যায়ক্রমে পর্যায়ক্রমে এবং বন্ধ হয়ে থাকে। এই ফ্রিকোয়েন্সিটি সাধারণত যথেষ্ট পরিমাণে বেশি যে অ্যাকিউউটরের মোটর স্যুইচিং ক্রিয়াটি বুঝতে পারে না, যার ফলে মসৃণ গতি নিয়ন্ত্রণ হয়।
- কর্ম চক্র: দ্য কর্ম চক্র একক চক্র চলাকালীন সময়ে সিগন্যালটি অন স্টেটে থাকা সময়ের শতাংশের পরিমাণকে বোঝায়। শুল্ক চক্রের পরিবর্তনের মাধ্যমে, অ্যাকিউউটরের মোটর সরবরাহ করা গড় ভোল্টেজ নিয়ন্ত্রণ করা যায়। একটি উচ্চতর শুল্ক চক্র একটি উচ্চতর গড় ভোল্টেজের সাথে মিলে যায়, যা দ্রুত অ্যাকুয়েটরের গতির দিকে পরিচালিত করে, যখন একটি নিম্ন শুল্ক চক্রের ফলে কম গড় ভোল্টেজ হয় এবং ফলস্বরূপ, ধীর অ্যাকুয়েটরের গতি হয়।
- মড্যুলেশন: যেমন ব্যবহারকারী বা একটি স্বয়ংক্রিয় সিস্টেম ডিসি অ্যাকিউউটরের কাঙ্ক্ষিত গতি সামঞ্জস্য করে, পিডব্লিউএম নিয়ামক সেই অনুযায়ী শুল্ক চক্রটি সংশোধন করে। এটি নিশ্চিত করে যে উপযুক্ত গড় ভোল্টেজটি অ্যাকুয়েটরকে সরবরাহ করা হয়, তার গতির উপর সুনির্দিষ্ট নিয়ন্ত্রণ সক্ষম করে।
- দক্ষতা: যেহেতু পিডব্লিউএম স্পিড কন্ট্রোলার দ্রুত পুরোপুরি বন্ধ এবং সম্পূর্ণরূপে বন্ধের মধ্যে স্যুইচ করে, তাপের আকারে শক্তি ক্ষতি হ্রাস করা হয়। এটি পিডব্লিউএমকে ডিসি অ্যাকিউউটরের গতি নিয়ন্ত্রণের জন্য একটি অত্যন্ত দক্ষ পদ্ধতি তৈরি করে।
সংক্ষেপে, একটি ডিসি স্পিড কন্ট্রোলার যা পিডব্লিউএমকে একটি ধ্রুবক ফ্রিকোয়েন্সি এবং বিভিন্ন শুল্ক চক্রের সাথে একটি স্কোয়ার ওয়েভ সিগন্যাল তৈরি করে কাজ করে। ডিউটি চক্রটি সামঞ্জস্য করে, নিয়ামক উচ্চ শক্তি দক্ষতা বজায় রেখে তার গতির উপর সুনির্দিষ্ট নিয়ন্ত্রণের অনুমতি দিয়ে ডিসি অ্যাকিউউটরের মোটর সরবরাহ করা গড় ভোল্টেজকে মডিউল করে।
আপনি কেন একটি স্পিড কন্ট্রোলার ব্যবহার করতে চান?
-
নির্ভুলতা নিয়ন্ত্রণ: একটি স্পিড কন্ট্রোলারের প্রাথমিক সুবিধা হ'ল অ্যাকিউউটরের গতির উপর সুনির্দিষ্ট নিয়ন্ত্রণ সরবরাহ করার ক্ষমতা। এই বৈশিষ্ট্যটি লোককে অ্যাকিউউটরের বেগকে সূক্ষ্ম-সুর করতে সক্ষম করে, এটি নিশ্চিত করে যে এটি নির্দিষ্ট কাজ বা হাতের প্রয়োগের জন্য সর্বোত্তমভাবে কাজ করে। নির্ভুলতার সাথে কাঙ্ক্ষিত গতি অর্জন করে আপনি সিস্টেমের সামগ্রিক কর্মক্ষমতা এবং কার্যকারিতা বাড়িয়ে তুলতে পারেন।
-
অভিযোজনযোগ্যতা: বিভিন্ন অ্যাপ্লিকেশন প্রায়শই বিভিন্ন গতির প্রয়োজনীয়তা দাবি করে বা অপারেশন চলাকালীন সামঞ্জস্য প্রয়োজন। দ্য FIRGELLI স্পিড কন্ট্রোলার আপনাকে প্রতিটি অ্যাপ্লিকেশনটির অনন্য চাহিদা মেটাতে সহজেই অ্যাকিউউটারের গতি সংশোধন এবং মানিয়ে নিতে নমনীয়তা সরবরাহ করে। এই অভিযোজনযোগ্যতা ইঞ্জিনিয়ারদের বিভিন্ন পরিস্থিতিতে সিস্টেমের কার্যকারিতা অনুকূল করতে সক্ষম করে।
-
মসৃণ অপারেশন: স্পিড কন্ট্রোলাররা, বিশেষত যারা পালস প্রস্থ মড্যুলেশন (পিডব্লিউএম) প্রযুক্তি নিয়োগ করে যা সর্বাধিক সঠিক গতি নিয়ামকরা করেন, তারা অ্যাকুয়েটরের গতির উপর মসৃণ এবং ধারাবাহিক নিয়ন্ত্রণ সরবরাহের সুবিধা দেয়। এই মসৃণ অপারেশনটি অত্যন্ত গুরুত্বপূর্ণ কারণ এটি যান্ত্রিক চাপকে হ্রাস করে এবং অ্যাকিউউটারে পরিধান করে, যার ফলে তার পরিষেবা জীবন প্রসারিত করে।
-
সিঙ্ক্রোনাইজেশন: নির্দিষ্ট অ্যাপ্লিকেশনগুলির একাধিক অ্যাকিউটেটরের মধ্যে সিঙ্ক্রোনাইজড আন্দোলন প্রয়োজন। এই জাতীয় ক্ষেত্রে, স্পিড কন্ট্রোলাররা জড়িত সমস্ত অ্যাকিউটেটরগুলিতে ধারাবাহিক গতি বজায় রাখতে গুরুত্বপূর্ণ ভূমিকা পালন করে। এই সিঙ্ক্রোনাইজেশন সুনির্দিষ্ট সমন্বয় এবং সুরেলা অপারেশন নিশ্চিত করে, যার ফলে সামগ্রিকভাবে সিস্টেমের অনুকূলিত কর্মক্ষমতা এবং কার্যকারিতা তৈরি হয়।
গতি কম এবং নীচে ঘুরিয়ে দেওয়ার সাথে সাথে স্পিড কন্ট্রোলার থেকে আপনি যে উচ্চ পিচ শব্দটি শুনতে পাচ্ছেন তা কী?
আপনি গতি কম এবং কম ঘুরিয়ে দেওয়ার সাথে সাথে স্পিড কন্ট্রোলারের কাছ থেকে আপনি যে উচ্চ-পিচযুক্ত শব্দটি শুনতে পাচ্ছেন তা সাধারণত ডাল প্রস্থের মড্যুলেশন (পিডাব্লুএম) কৌশলটির স্যুইচিং ফ্রিকোয়েন্সি দ্বারা ব্যবহৃত হয় যা অ্যাকুয়েটরের গতি নিয়ন্ত্রণ করতে ব্যবহৃত হয়।
পিডব্লিউএম দ্রুত একটি ধ্রুবক ফ্রিকোয়েন্সিতে মোটর চালু এবং বন্ধে পাওয়ার সাপ্লাই স্যুইচিং জড়িত। যখন গতি হ্রাস পায়, ডিউটি চক্র (সিগন্যালটি অন রাজ্যে থাকে তার শতাংশ) হ্রাস পায়, যার ফলে মোটরটি কম গড় ভোল্টেজ গ্রহণ করে। কিছু ক্ষেত্রে, পিডব্লিউএম ফ্রিকোয়েন্সি বা এর সুরেলাগুলি মানুষের শ্রবণশক্তি (20 হার্জ থেকে 20 কেজি হার্জ) এর শ্রুতিমধুর পরিসরের মধ্যে পড়তে পারে।
স্পিড কন্ট্রোলারের মধ্যে মোটর কয়েল বা অন্যান্য উপাদানগুলির কম্পনের কারণে শব্দটি উত্পন্ন হতে পারে, যা পিডব্লিউএম ফ্রিকোয়েন্সি বা এর সুরেলাগুলিতে অনুরণিত হয়। এই কম্পনটি মোটর কয়েলগুলিতে বৈদ্যুতিক স্রোত দ্বারা উত্পাদিত চৌম্বকীয় ক্ষেত্রের দ্রুত সম্প্রসারণ এবং সংকোচনের কারণে ঘটে যখন তারা রাজ্যের মধ্যে এবং বন্ধের মধ্যে স্যুইচ করে।
গতি কমে যাওয়ার সাথে সাথে ডিউটি চক্র হ্রাস পায় এবং প্রতিটি স্যুইচিং চক্রের সময় মোটর কম শক্তি গ্রহণ করে। ক্ষমতার এই পরিবর্তনটি শ্রুতিমধুর শব্দকে আরও স্পষ্ট হয়ে উঠতে পারে। অতিরিক্তভাবে, মোটর এবং গতি নিয়ামকের যান্ত্রিক এবং বৈদ্যুতিক বৈশিষ্ট্যের উপর নির্ভর করে সিস্টেমের কিছু অনুরণনমূলক ফ্রিকোয়েন্সি শ্রুতিমধুর শব্দ উত্পাদন করতে আরও সংবেদনশীল হতে পারে।




