بعد الانتهاء من وميض LED بطرق فريدة ورائعة تمامًا ، سترغب في التفاعل فعليًا مع البيئة المادية. إليك المكان الذي تأتي فيه المحركات الخطية. إذا كنت ترغب في تحريك شيء ما ، وفتح شيئًا ، أو محور شيء ما ، فإن المشغل الخطي هو على الأرجح أفضل طريقة للقيام بذلك. ولماذا يرفع الرفع ، والتحرك ، وتحقيق نفسك عندما يمكنك الحصول على مشغل خطي للقيام بالعمل الشاق.
تأكد من أنه يمكنك الضغط على زر على عنصر تحكم عن بعد أو مفتاح موسيقى الروك ، ولكن لماذا لا يكون لديك مستشعر حركة أو حتى ساعة في الوقت الفعلي للأحداث القائمة على الوقت.
إذا كنت تدخل فقط إلى Arduino ، فقد لا تكون على دراية أنه لا يمكنك فقط توصيل محرك كبير بدبابيس اللوحة والبدء في نقله. يجب عليك استخدام بعض آلية التبديل لحمل الحمل الحالي. يمكنك استخدام برنامج تشغيل محرك أو H-bridge ، ولكن أبسط وأسرع طريقة هي استخدام مرحلين أو لوحة ترحيل. لديك خياران عند استخدام Arduino مع مشغل خطي. يمكنك فقط استخدام لوحة الترحيل للتحكم في الطاقة الذهاب إلى المشغل بدون معلومات الموضع ، أو إذا كنت تستخدم أحد مشغلات FA-PO ، يمكنك تحديد موضع العمود وإنشاء التحكم في موضع حلقة مغلقة. في هذه المقالة ، سنركز على الخيار الأكثر بساطة ، فقط باستخدام المرحلات للتحكم في المشغل وعدم وجود معلومات في الموضع.
تأكد من استخدام المرحلات (أو لوحة الترحيل) مع مرحلات SPDT. تحتوي مرحلات SPDT (رمية مزدوجة قطب واحدة) على ثلاثة اتصالات لكل ترحيل. شائعة ، مفتوحة عادة ، مغلقة عادة. سنذهب إلى مزيد من التفاصيل حول المرحلات في مقال آخر ، فقط تأكد من حصولك على مرحلات SPDT وإلا فلن يعمل. تحتاج إلى اثنين من مرحلين SPDT للتحكم في المحرك. مع اثنين من مرحلين SPDT ، يمكنك البدء وتوقف وتغيير اتجاه المشغل.
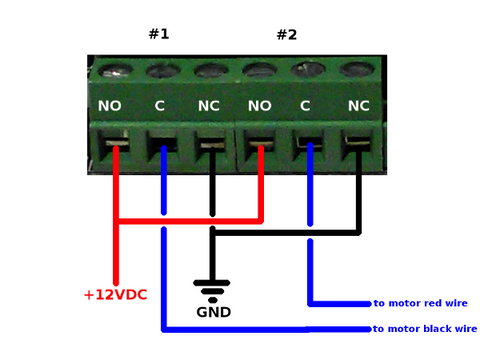
كما ترون في مخطط الأسلاك أدناه ، تقوم بتوصيل أرضك 12VDC بمحطة مغلقة عادةً للمرحلين ، وتوصيل +12VDC الخاص بك بالمحطة المفتوحة عادةً للمرحلين. يمكنك إما عمل تقاطع لتقسيم كل سلك إلى قسمين ، أو استخدام سلك الطائر القصير. تقوم بتوصيل سلكي المحرك بالمحطة المشتركة ، واحدة لكل ترحيل.
بالنسبة لرمز Arduino ، لنفترض أن الدبابيس الرقمية 2 و 3 هي التحكم في المرحلين. سيكون عليك التحقق من ما هو موجود على لوحتك. فيما يلي مقتطف رمز بسيط يوضح كيف يمكنك تمديد المشغل الخطي ، وتراجعه وإيقافه.
const int RELAY_1_A = 2; const int RELAY_1_B = 3; void setup() { pinMode(RELAY_1_A, OUTPUT);int المحرك) {pinMode(RELAY_1_B, OUTPUT);} فارغ loop() { //This is where your program logic goes //You can call the functions to control the //actuator here, as well as reading sensors, etc.. } فارغ extuctuator (int المحرك) {// تعيين ترحيل واحد والآخر OFF // سيؤدي هذا إلى تمديد المحرك DigitalWrite(RELAY_1_A ، عالي); DigitalWrite(RELAY_1_B ، قليل); } فارغ التراجع (
// قم بتعيين ترحيل واحد والآخر على
// سيؤدي هذا إلى نقل التراجع عن المشغل
DigitalWrite(RELAY_1_A ، قليل);
DigitalWrite(RELAY_1_B ، عالي);
}
فارغ stopactuator (int المحرك) {
// قم بتعيين كلتا المرحلين
// سيوقف هذا المشغل في الكبح
DigitalWrite(RELAY_1_A ، قليل);
DigitalWrite(RELAY_1_B ، قليل); }
يجب أن يجعلك هذا مستمرًا باستخدام Arduino (أو غيره من متحكم) مع مرحلات للتحكم في Firgelli أتمتة المحرك الخطي.
إذا كنت تبحث عن مشغل خطي لتبدأ به ، اتصل بنا أو أرسل لنا بريدًا إلكترونيًا على خطنا الفني. إذا كنت تبحث عن مشغل فرس العمل الصلب ، تحقق من مشغلات خطية من سلسلة الخدمة الخفيفة نحمل ، أو وحدات الخدمة الخفيفة مع ردود الفعل الجهد. لا تنسى أن إمدادات الطاقة 12VDC جيدة يمكنها التعامل مع الأحمال الاستقرائية. MB1 قوسين للمحركات الخطية (MB1 لسلسلة FA-150) سيوفر لك الكثير من الوقت والإحباط.



