Utilizar feedback para garantir movimentos precisos é fundamental em qualquer projeto de automação, desde elevadores robóticos até elevadores de TV. A implementação adequada do feedback permite um controle preciso do circuito fechado do seu atuador linear; você não precisa mais verificar manualmente se o atuador linear está na posição correta. Como os atuadores lineares são normalmente usados para mover um objeto de uma posição para outra, o feedback mais importante a receber do seu atuador é a sua posição. Atuadores lineares que possuem feedback de posição normalmente medem a posição usando um dos 3 sensores diferentes; potenciômetros, sensores de efeito hall e sensores ópticos.
Potenciômetros
Potenciômetros são resistores variáveis que quando usados em atuadores lineares, sua resistência muda com base na posição do atuador. Os potenciômetros consistirão em 3 pinos conforme mostrado abaixo, o pino 1 é a tensão de entrada, o pino 3 é o terra e o pino 2 é o resistor ajustável. Você pode ler a saída dos potenciômetros medindo a tensão entre o pino 2 e o terra, que mudará conforme o atuador se move. Para efetivamente implementar este feedback, você precisará usar algum tipo de controlador, como um Arduíno, para ler esse valor posicional à medida que o atuador se move.

Um dos maiores pontos fortes de um potenciômetro é que ele fornece uma indicação da posição absoluta do atuador linear. Por causa disso, esse feedback pode ser bastante fácil de manusear no software de um controlador, pois você pode simplesmente comparar a leitura de saída atual com a leitura de saída da posição desejada. Você também nunca terá que se preocupar em perder a posição do atuador se desligar o sistema, pois a resistência do potenciômetro será a mesma, independentemente de estar ligado ou não.

Existem algumas desvantagens no uso de potenciômetros para feedback posicional. Uma desvantagem é que o feedback do potenciômetro pode ser afetado por ruído elétrico e pode exigir que você filtre o sinal para obter resultados estáveis. A saída do potenciômetro também depende da tensão de entrada do potenciômetro, o que pode dificultar a garantia de que vários atuadores lineares se movam simultaneamente, pois o sinal de saída pode variar ligeiramente devido a pequenas alterações na tensão de entrada. Além disso, os potenciômetros geralmente não serão tão sensíveis a movimentos menores do atuador linear, em comparação com outras opções de feedback, dificultando a repetência dos resultados.
Sensor de efeito Hall
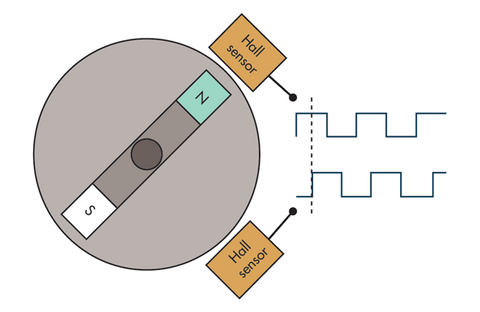
Sensores de efeito Hall trabalho baseado no efeito Hall, que é o efeito de um campo magnético para produzir uma tensão. Os sensores de efeito Hall podem fornecer uma saída digital ou linear, mas para atuadores lineares, eles normalmente usam sensores de efeito Hall de saída digital. Quando esses sensores detectam um campo magnético, eles produzem uma tensão que pode ser lida por um controlador [1]. Com atuadores lineares, esses sensores são posicionados dentro da caixa de engrenagens do atuador junto com um disco magnético. À medida que o atuador linear se move, este disco magnético gira e passa pelo sensor de efeito Hall que produz um pulso de tensão. Esses pulsos podem ser usados para determinar quão longe o atuador se moveu. Geralmente, os atuadores lineares que usam sensores de efeito Hall para fornecer feedback de posição especificarão o pulso por polegada percorrida que você pode usar para determinar a distância que o atuador se move. Por exemplo, se você detectou 6.000 pulsos e seu atuador tem um pulso por polegada percorrida de 12.000, isso significa que seu atuador se moveu 0,5 polegada.
A principal desvantagem de usar um sensor de efeito Hall para feedback posicional em comparação com um potenciômetro é que os sensores de efeito Hall não medem uma posição absoluta. Em vez disso, eles produzem pulsos que podem ser contados para determinar o quanto o atuador se moveu, o que exige que você saiba onde o atuador começa para determinar a posição absoluta. Isso pode ser superado no software do seu controlador, como em um Arduino, armazenando a posição atual do atuador e sempre iniciando o atuador a partir de uma posição conhecida, como totalmente retraído. Isso pode exigir que você posicione o atuador nesta posição conhecida sempre que ligar o sistema.
A vantagem de usar um sensor de efeito Hall para feedback posicional é que ele fornece uma resolução muito maior em comparação com o feedback de um potenciômetro. Como pode haver milhares de pulsos por polegada de movimento, os sensores de efeito Hall fornecem precisão e confiabilidade no posicionamento de seu atuador linear. Os pulsos também variam em frequência com base na velocidade do seu atuador linear, o que significa que você pode usá-los para medir a velocidade do seu atuador linear. Os sensores de efeito Hall também oferecem maior capacidade de garantir que vários atuadores lineares se movam juntos simultaneamente, pois as contagens de pulso são mais precisas do que a variação da tensão do potenciômetro. Utilizando nosso Controlador de atuador FA-SYNC-X, você pode até garantir que os atuadores se movam em uníssono, independentemente da carga.
Sensor óptico
Sensores ópticos que são usados em atuadores lineares (existem outros tipos de sensores ópticos) funcionam de forma muito semelhante aos sensores de efeito Hall, exceto que detectam luz usando um fotodetector [2]. Os sensores ópticos funcionam fazendo com que a luz de um LED ou alguma outra fonte de luz passe através de um disco codificador. Este disco codificador tem uma fenda para permitir que a luz passe através dele periodicamente. Do outro lado do disco está o fotodetector, que detecta a luz quando ela passa pelas ranhuras do disco e cria um sinal de saída [3]. À medida que o atuador se move, o disco codificador gira e a luz é detectada pelo fotodetector que produz um pulso de tensão. Esses pulsos podem ser usados de forma semelhante aos pulsos de um sensor de efeito Hall para determinar quão longe o atuador se moveu. Atuadores lineares que usam sensores ópticos para feedback de posição também especificarão o pulso por polegada percorrida que você pode usar para determinar a distância que o atuador se move.

Os sensores ópticos, novamente, têm vantagens e desvantagens semelhantes aos sensores de efeito Hall quando comparados aos potenciômetros. Eles possuem maior precisão e resolução, ainda maiores que os sensores de efeito Hall, e podem ser usados para medir a velocidade do atuador linear. Eles também são melhores para garantir que seus múltiplos atuadores lineares se movam simultaneamente e podem fazer uso do Controlador de atuador FA-SYNC-X. Eles também não medem a posição absoluta e, em vez disso, exigem que você conte o pulso para determinar a distância que o atuador se moveu. Você também precisará começar em uma posição conhecida, pois precisará salvar a posição atual no software para acompanhar a posição absoluta.
Resumo
Sua escolha do tipo de feedback que você deseja do seu atuador linear dependerá do que você considera mais importante para sua aplicação. Você precisa de um alto nível de precisão? Escolha um atuador linear com sensor óptico ou de efeito Hall. Você não quer ter que colocar seu atuador na posição inicial toda vez que ligá-lo? Então vá com um atuador linear com potenciômetro. Você deseja controlar vários atuadores lineares simultaneamente? Escolha um atuador linear com sensor óptico ou de efeito Hall. Você quer que seu feedback forneça uma posição absoluta? Escolha um atuador linear com potenciômetro.
[1] Monari, G. (junho de 2013) Compreendendo a resolução em codificadores ópticos e magnéticos. Obtido de: https://www.electronicdesign.com/technologies/components/article/21798142/understanding-resolution-in-optical-and-magnetic-encoders
[2] Paschotta, R. Artigo sobre Sensores Ópticos. Obtido de:https://www.rp-photonics.com/optical_sensors.html



