Este projeto mostra como aproveitar um controle remoto TiVo e uma placa Arduino para operar um atuador linear para levantar uma pintura que cobre uma TV. Assista ao vídeo no final
Ferramentas necessárias
As seguintes ferramentas serão necessárias para concluir este projeto.
- Chave de fenda Phillips nº 0
- Ferro de solda
- Solda
- Cortadores de fio
- Alicate pequeno (usei um alicate projetado para trabalhar com pequenos eletrônicos)
Lista de peças
As seguintes partes são necessárias para concluir este projeto.
- Atuador de esteira para serviço pesado de Firgelli Automações
- Controle remoto TiVo Roamio
- Arduino Uno Rev 3
- Caixa de projeto Hammond 1591ESBK ABS preta (7,5" x 4,3" x 2,2")
- Microtivity IB171 Mini placa de ensaio de 170 pontos para Arduino
- Receptor infravermelho 2,5–5,5V 38kHz
- 100 PCS Michael Josh 20 CM M/F Jumper Wires Cabos 1 Pin Plug Macho para Fêmea
- Módulo de relé SainSmart de 2 canais
- Cabo USB 2.0 — A-macho para B-macho
- 4 pés de fio de sprinkler preto 18/5
- 8 qtd # 4–40 x 2 ”parafusos de máquina de aço inoxidável (comprei-os na Home Depot)
- 8 qtd Everbuilt # 4–40 porcas de parafuso de máquina (eu as comprei na Home Depot)
- Espaçadores de náilon de 16 qts de ½ ”(comprei-os na Home Depot)
- 1 quantidade de gravata zip
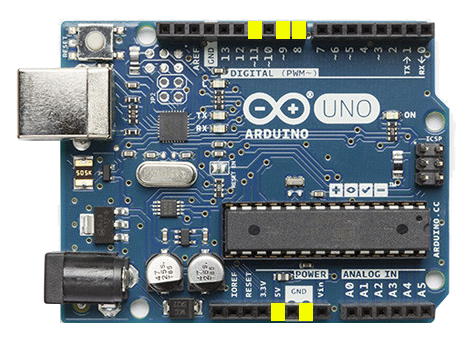
Configurando o Arduino Uno Rev 3
Usaremos os seguintes pinos da placa Arduino destacados em amarelo.
- Potência 5V
- Digitais #8
- Digitais #9
- Digitais #11
- Potência GND
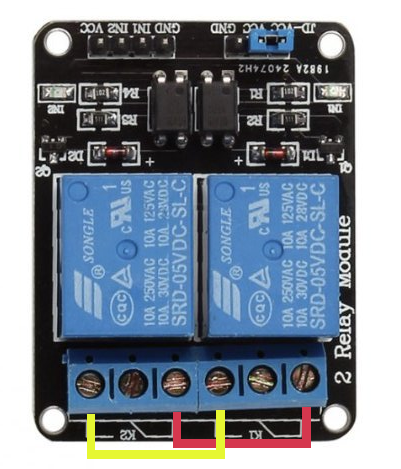
Configurando o módulo de relé SainSmart de 2 canais
Temos que fazer um jumper no módulo de relé SainSmart para coincidir com o Firgelli Atuador linear de automações. Há um jumper azul de JD-VCC para VCC. Deixe isso no lugar como está.
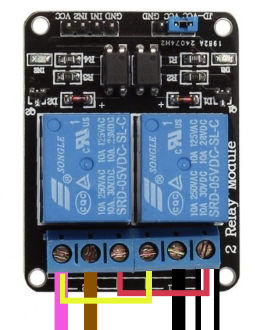
Jumper K1 posição 1 para K2 posição 1
Coloque um fio jumper da primeira posição no relé K1 até a primeira posição no relé K2. Nosso jumper é mostrado em vermelho.

Jumper K1 posição 3 para K2 posição 3
Coloque um fio jumper da terceira posição no relé K1 até a terceira posição no relé K2. Nosso jumper é mostrado em amarelo.

Quando saltado corretamente, você deverá ver a seguinte configuração.
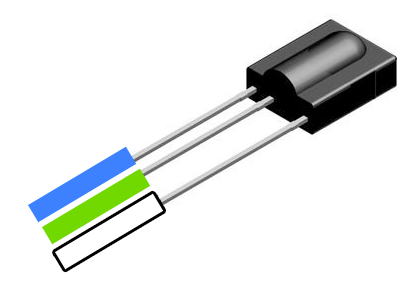
Configurando o sensor infravermelho
O sensor infravermelho possui três fios que saem dele. Um é para um fio terra, o outro é para um fio de alimentação de 5 V e o terceiro envia o sinal para nossa placa Arduino.
Retire cinco centímetros da blindagem externa do fio do sprinkler 18–5 para expor os fios coloridos internos. Usaremos apenas os fios verde, branco e azul, então corte os outros para não ter que mexer neles.
Retire ⅛” do isolamento de cada um dos fios que usaremos. Eles serão soldados ao relé usando a seguinte configuração. Ao olhar para o sensor de cima com a saliência redonda voltada para você:
- Solde o fio azul ao terminal esquerdo.
- Solde o fio verde ao terminal do meio.
- Solde o fio branco ao terminal direito.
Configurando o chicote elétrico do atuador linear
O atuador linear vem com um controle remoto com fio com dois botões triangulares. Um botão ativa uma chave que move o atuador linear para cima e o outro o move para baixo.
Remova o corpo do controle remoto da placa de circuito
A primeira coisa é desparafusar os fios da parte traseira do controle remoto. Eles precisarão ser removidos com uma chave de fenda Phillips nº 0.
Remova a placa de circuito do corpo do controle remoto e examine os fios. Olhando de baixo, deve haver quatro fios soldados à placa. Da esquerda para a direita, eles são pretos, brancos, roxos e marrons, conforme mostrado abaixo.
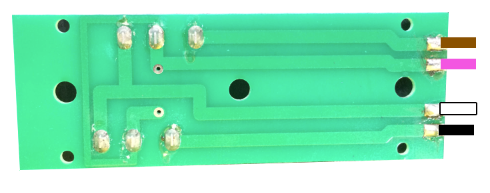
Se por algum motivo eles usaram cores diferentes, basta acompanhar as cores na mesma ordem abaixo.
Dessoldar os fios
Usando um ferro de solda, remova os fios da placa de circuito. Pressione suavemente a ponta do ferro de solda na solda existente no ponto de solda para soltá-la e, usando um pequeno alicate, puxe suavemente o fio para fora do ponto de solda.
Conecte os fios aos relés
Agora conectaremos os fios do controle remoto com fio ao relé SainSmart de 2 canais. Use a chave de fenda Phillips nº 0 para desparafusar o terminal e aperte-o novamente para prender o fio.
- O fio branco irá para a posição K1 1
- O fio preto irá para a posição K1 2
- O fio marrom irá para a posição K2 2
- O fio roxo irá para a posição 3 do K2
Nota: não remova os fios jumper existentes. Deixe-os inseridos ao aparafusar os terminais.
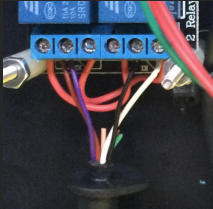
Quando terminar, deve ser semelhante às imagens acima.
Conectando a placa de ensaio
Agora iremos conectar a placa Arduino à placa de ensaio. A placa de ensaio nos permite fazer jumpers em conexões onde há múltiplas conexões sendo feitas em um terminal no Arduino ou no relé.
Cada fileira de buracos está conectada entre si, permitindo-nos saltar tudo naquela fileira. Aqui estão os itens que precisaremos conectar.
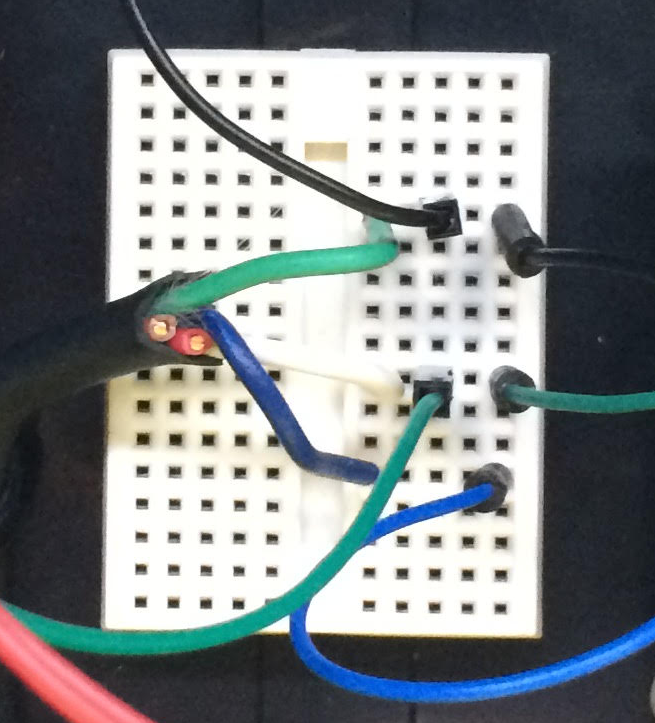
Potência 5V
- Use um jumper macho-fêmea do terminal Power 5V no Arduino para uma linha não utilizada na placa de ensaio. Empurre-o para um buraco na fileira.
- Use um fio jumper macho-fêmea da mesma linha na placa de ensaio para o terminal VCC no relé SainSmart de 2 canais. Empurre-o para um buraco na mesma linha.
- Exponha ¼” do fio branco do outro lado do fio do sprinkler 18–5. Empurre-o para um buraco na mesma linha.
Chão
- Use um jumper macho-fêmea do terminal Power GND no Arduino para uma linha não utilizada na placa de ensaio. Empurre-o para um buraco na fileira.
- Use um fio jumper macho-fêmea do terminal GND no relé SainSmart de 2 canais até um orifício na mesma linha do outro fio GND. Empurre-o para dentro do buraco na mesma linha.
- Exponha ¼” do fio verde do outro lado do fio do sprinkler 18–5. Empurre-o para um buraco na mesma linha.
Sinalização
- Use um jumper macho-fêmea do terminal Digital #11 no Arduino para uma linha não utilizada na placa de ensaio. Empurre-o para um buraco na fileira.
- Exponha ¼” do fio azul do outro lado do fio do sprinkler 18–5. Empurre-o para um buraco na mesma linha.
Quando terminar, a placa de ensaio deve ser semelhante à imagem a seguir.
Instale o programa de controle no Arduino
Você precisará baixar e instalar o IDE do Arduino. Depois de baixar e instalar o IDE, abra-o.
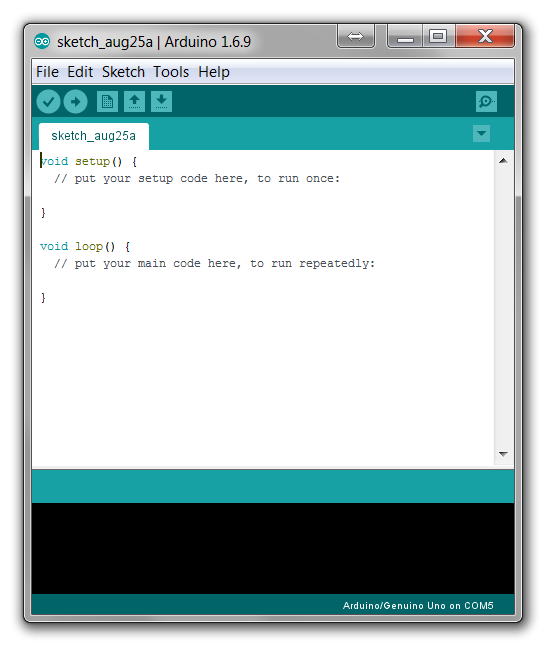
Copie e cole o código no IDE
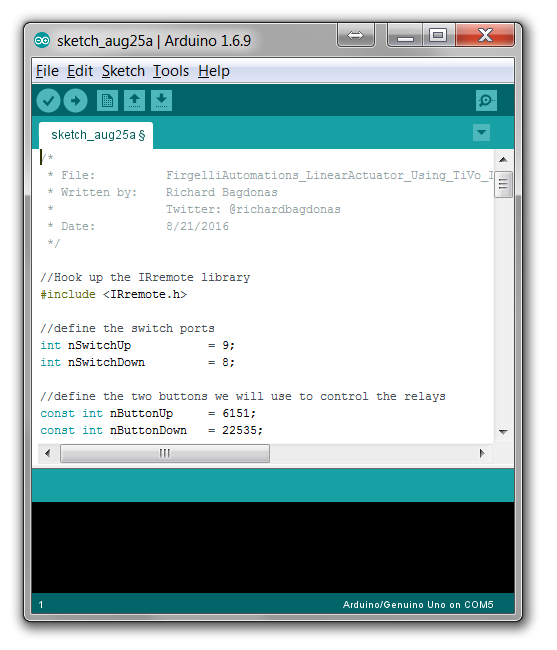
Baixe ou copie o código-fonte de GitHub e cole-o na janela do IDE, que deverá ficar assim quando terminar.
Ajuste o arquivo IRremote.cpp
Há um arquivo no diretório C:\Program Files (x86)\Arduino\libraries\RobotIRremote\src\ que tem um problema de código-fonte que impede a compilação do código-fonte do GitHub. Abra o arquivo IRremoteTools.cpp em um editor de texto simples como o bloco de notas e altere a seguinte linha:
A linha 5 deve ficar assim:
int RECV_PIN=TKD2; //o pino ao qual o receptor IR está conectado
Altere para o seguinte e salve o arquivo.
interno RECV_PIN = 11; //o pino ao qual o receptor IR está conectado
Conecte o arduino ao seu computador usando o cabo USB
Coloque o Arduino, a placa de ensaio e as placas de relé em uma superfície não condutora, como uma mesa de madeira.
Conecte o lado retangular do cabo USB ao computador e o lado “D” à placa Arduino.
Selecione a porta
Selecione o item de menu Ferramentas — Porta e selecione aquele que mostra sua placa Arduino.
Carregar o código
Selecione o item de menu Sketch — Upload para fazer upload do código para o Arduino.
Teste o código
Após o upload do código, conecte o chicote de fios do Firgelli Automatiza o atuador linear de volta ao atuador e conecta o atuador.
Mantenha a placa Arduino conectada ao computador por meio do cabo USB.
Aponte seu controle remoto TiVo para o sensor infravermelho e clique no botão verde “curtir”. O atuador deve mover-se para cima.
Aponte o controle remoto TiVo para o sensor infravermelho e clique no botão vermelho “não gostar”. O atuador deve mover-se para baixo.
Encaixote tudo
Usei a caixa do projeto Hammond junto com os parafusos, espaçadores e porcas dos parafusos para alojar minhas placas de circuito. Usei uma ponta pontiaguda no ferro de solda para fazer furos na caixa de plástico preta e também para abrir espaço para os fios nas laterais. Usei o zíper para evitar que o fio do sensor infravermelho fosse puxado. Os fios de controle do Firgelli Atuador linear de automações tinha um pedaço de borracha projetado para evitar que fossem puxados para que eu pudesse aproveitá-lo.
Sobre o autor
Richard Bagdonas é especialista em integração de dados com mais de 15 anos de experiência em integração com sistemas de ponto de venda, prontuário eletrônico de saúde, gestão de relacionamento com clientes e gestão de armazém. Richard mexe com eletrônica desde criança e este é seu primeiro projeto com Arduino.
Atualmente, Richard é arquiteto-chefe de saúde no MI7, onde supervisiona a integração da empresa com sistemas de registros eletrônicos de saúde.



