Dalam contoh ini kita akan mengontrol kecepatan aktuator linier dengan Arduino dan driver motor.
Catatan: Tutorial ini mengasumsikan pengetahuan sebelumnya dengan prinsip-prinsip elektronik dasar, perangkat keras dan perangkat lunak Arduino. Jika ini adalah pertama kalinya Anda menggunakan Arduino, kami sarankan untuk mempelajari dasar-dasarnya dari salah satu dari banyak tutorial pemula hebat yang tersedia melalui pencarian Google dan YouTube. Perlu diketahui bahwa kami tidak memiliki sumber daya untuk memberikan dukungan teknis untuk aplikasi kustom dan tidak akan men-debug, mengedit, memberikan kode atau diagram pengkabelan di luar tutorial yang tersedia untuk umum ini.
Komponen
- Aktuator Linear 12V
- Catu daya 12V
- Arduino
- Pengemudi Motor
- Potensiometer (opsional)
- Kabel listrik untuk membuat sambungan dan alat crimping atau besi solder
Pengkabelan
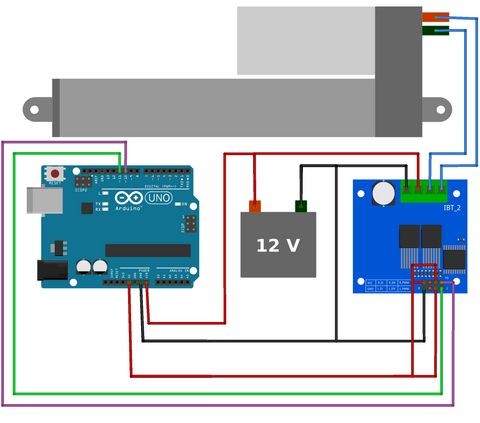
Ikhtisar perangkat keras dan perangkat lunak
Motor DC dalam aktuator linier membutuhkan arus tinggi (hingga 5A), jika kita menghubungkan aktuator linier langsung ke Arduino, penarikan arus tinggi ini akan menghancurkan pin digital Arduino karena masing-masing hanya diberi peringkat 40mA. Oleh karena itu kami menggunakan driver motor yang dapat mengambil sinyal PWM arus rendah (modulasi lebar pulsa) dari papan Arduino dan mengeluarkan sinyal PWM arus tinggi ke aktuator linier.
Driver motor dihubungkan ke dua pin digital PWM (pin 10 dan 11 pada Arduino Uno). Dengan mengatur salah satu pin ini RENDAH dan yang lainnya TINGGI (lihat baris 18 dan 19 pada kode di bawah) kita dapat memperpanjang aktuator pada kecepatan maksimum. Untuk menghentikan aktuator kita atur kedua pin ke LOW (lihat baris 21 dan 22 pada kode di bawah) dan untuk membalikkan arah gerak kita dapat membalik urutan pin HIGH dan LOW (lihat baris 24 dan 25 pada kode di bawah). Kami juga dapat menyesuaikan kecepatan dengan mengubah variabel "Kecepatan" ke nilai apa pun dalam rentang [0, 255]; lihat baris 17 pada kode di bawah ini.
Kode
https://gist.github.com/Will-Firgelli/c0ef0871dc1946d75257e0c29dccae2a
Kontrol kecepatan yang bervariasi dengan potensiometer
Dalam contoh di atas, kami mengatur kecepatan secara manual di baris 17 kode. Namun situasi mungkin muncul di mana kita ingin memvariasikan kecepatan aktuator dalam waktu. Metode termudah untuk mencapai ini adalah dengan menggunakan potensiometer. SEBUAH potensiometer adalahresistor variabel tiga terminal yang dapat bertindak sebagai pembagi tegangan. Dengan memutar kenop potensiometer, tegangan keluaran akan bervariasi dan kita dapat menghubungkannya ke pin analog pada Arduino untuk mengatur kecepatan variabel.
Pengkabelan

Ikhtisar perangkat keras dan perangkat lunak
Seperti disebutkan di atas, potensiometer adalah perangkat putar yang mengubah tahanan saat kenop diputar. Dengan menghubungkan dua pin luar potensiometer ke 5V dan GND, dan pin tengah ke pin analog Arduino, A0, pembagi tegangan dibuat. Saat kenop diputar, Arduino akan membaca bacaan analog mulai dari [0, 1023].
Untuk nilai dalam rentang [512, 1023] kami ingin aktuator diperpanjang dan untuk nilai [0, 511] kami ingin aktuator ditarik, ini dapat dicapai dengan pernyataan if () / else sederhana di baris 22 dan 28 di kode di bawah ini. Kemudian menggunakan fungsi map () (baris 23 dan 29 pada kode di bawah) kita dapat mengubahnya menjadi sinyal PWM yang akan mengontrol kecepatan dan arah aktuator.
Kode
https://gist.github.com/Will-Firgelli/d2cdf69edc829974885984b3fb8e4856



