Kontrol kecepatan aktuator linier

Aktuator linier memainkan peran penting dalam operasi di berbagai sektor, termasuk perawatan kesehatan, manufaktur, pertanian, otomotif antara lain; Oleh karena itu kebutuhan akan presisi dan akurasi yang lebih besar sangat penting. Pengontrol kecepatan aktuator linier menawarkan mekanisme kontrol yang optimal untuk mengatur gerakan pada kecepatan yang diinginkan sesuai persyaratan aplikasi.
Fungsi utama pengontrol kecepatan aktuator linier mengatur input tegangan yang dipasok ke motor listrik atau aktuator sambil tetap mengakomodasi persyaratan beban pada kapasitas output gaya maksimal - sehingga memastikan efisiensi yang lebih besar dalam sistem dinamis.
Mengontrol kecepatan aktuator linier membutuhkan mekanisme canggih seperti menerapkan loop kontrol kecepatan yang melibatkan loop umpan balik yang diperoleh dari sensor tertanam yang mendeteksi perubahan posisi atau kecepatan-ini membantu menghasilkan hasil yang optimal melalui kalibrasi. FIRGELLIPapan kontrol aktuator fitur loop umpan balik kontrol kecepatan bawaannya sendiri yang menetapkan kondisi optimal untuk operasi sambil memastikan pergerakan yang tepat untuk kemajuan sistem Anda.

FIRGELLIPapan kontrol aktuator memang memiliki loop umpan balik kontrol kecepatan bawaan sendiri jika Anda memerlukan sistem loop tertutup umpan balik untuk mengendalikan kecepatan dengan sangat akurat. Kotak kontrol ini dapat digunakan dengan aktuator linier yang telah membangun sensor umpan balik, Soch sebagai sensor aula atau sensor optik, karena membutuhkan sensor ini untuk mengukur kecepatan akuator.
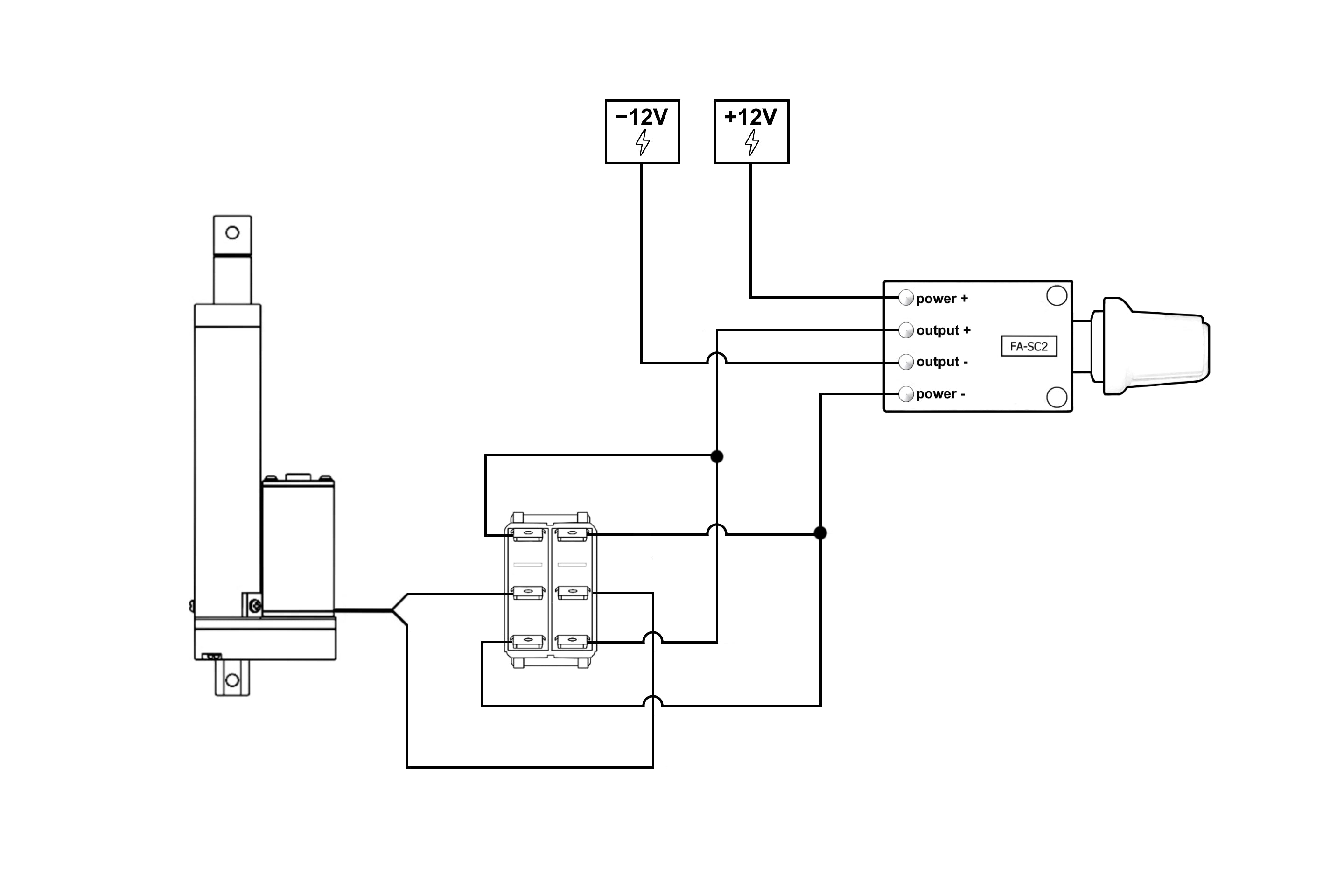
Untuk memastikan ketepatan dan menghindari kesalahan, aktuator linier yang diatur oleh pengontrol kecepatan terus memantau dan menilai kembali kecepatannya. Diagram kabel berikut menggambarkan cara menghubungkan aktuator linier ke sakelar rocker dan pengontrol kecepatan untuk kinerja dan kontrol yang optimal.
Diagram kabel untuk pengontrol kecepatan dan aktuator
Kontrol umpan-maju
Dalam konteks aktuator linier dan kontrol kecepatan, kontrol umpan-maju adalah konsep penting. Pendekatan ini beroperasi dengan asumsi bahwa, sebagai pengontrol, pengguna dapat secara akurat memprediksi output pengontrol kecepatan dan melakukan penyesuaian yang diperlukan. Tujuan utama dari loop kontrol untuk regulasi kecepatan adalah untuk mengoptimalkan kecepatan aktuator untuk menyelaraskan dengan persyaratan tugas tertentu. Asalkan semua variabel tetap konstan, kontrol feed-forward memungkinkan pengguna untuk membuat prediksi berdasarkan informasi mengenai hubungan antara siklus tugas aktuator dan kecepatannya, berdasarkan nilai sensor per detik.
Dengan menghitung siklus tugas, pengguna dapat secara akurat mencapai kecepatan yang diinginkan sambil meminimalkan kesalahan dalam estimasi. Pendekatan ini mengurangi risiko overshooting dan kehilangan target sepenuhnya, atau berhenti sebelum waktunya sebelum mencapai target, sehingga merusak tujuan mendasar untuk memanfaatkan aktuator linier.
Bagaimana pengontrol kecepatan DC mengontrol kecepatan aktuator
Pengontrol kecepatan DC yang menggunakan modulasi lebar pulsa (PWM) adalah perangkat elektronik canggih yang dirancang untuk mengatur kecepatan a Aktuator DC. PWM adalah teknik yang memungkinkan kontrol tegangan rata -rata yang dipasok ke motor DC dengan dengan cepat menyalakan dan mematikan daya pada frekuensi konstan. Kecepatan aktuator DC dapat dimodulasi dengan menyesuaikan waktu (siklus tugas) relatif terhadap waktu mati dalam setiap siklus.
Berikut gambaran tentang bagaimana pengontrol kecepatan DC menggunakan PWM beroperasi untuk mengontrol kecepatan aktuator DC:
- Frekuensi: Pengontrol PWM menghasilkan sinyal gelombang persegi frekuensi konstan, yang terdiri dari periode on dan off bolak -balik. Frekuensi ini biasanya cukup tinggi sehingga motor aktuator tidak merasakan tindakan switching, menghasilkan kontrol kecepatan yang halus.
- Siklus: The siklus Mengacu pada persentase waktu sinyal tetap dalam keadaan selama satu siklus. Dengan memvariasikan siklus tugas, tegangan rata -rata yang dipasok ke motor aktuator dapat dikontrol. Siklus tugas yang lebih tinggi sesuai dengan tegangan rata -rata yang lebih tinggi, yang mengarah ke kecepatan aktuator yang lebih cepat, sementara siklus tugas yang lebih rendah menghasilkan tegangan rata -rata yang lebih rendah dan, akibatnya, kecepatan aktuator yang lebih lambat.
- Modulasi: Karena pengguna atau sistem otomatis menyesuaikan kecepatan aktuator DC yang diinginkan, pengontrol PWM memodifikasi siklus tugas yang sesuai. Ini memastikan bahwa tegangan rata -rata yang sesuai dipasok ke aktuator, memungkinkan kontrol yang tepat atas kecepatannya.
- Efisiensi: Karena pengontrol kecepatan PWM dengan cepat beralih antara negara -negara yang sepenuhnya hidup dan sepenuhnya, kehilangan energi dalam bentuk panas diminimalkan. Ini membuat PWM metode yang sangat efisien untuk mengendalikan kecepatan aktuator DC.
Singkatnya, pengontrol kecepatan DC yang menggunakan pekerjaan PWM dengan menghasilkan sinyal gelombang persegi dengan frekuensi konstan dan berbagai siklus tugas. Dengan menyesuaikan siklus tugas, pengontrol memodulasi tegangan rata -rata yang dipasok ke motor aktuator DC, memungkinkan untuk kontrol yang tepat atas kecepatannya sambil mempertahankan efisiensi energi yang tinggi.
Mengapa Anda ingin menggunakan pengontrol kecepatan?
-
Kontrol presisi: Manfaat utama pengontrol kecepatan adalah kemampuannya untuk memberikan kontrol yang tepat atas kecepatan aktuator. Fitur ini memungkinkan orang untuk menyempurnakan kecepatan aktuator, memastikannya beroperasi secara optimal untuk tugas atau aplikasi tertentu yang ada. Dengan mencapai kecepatan yang diinginkan dengan akurasi, Anda dapat meningkatkan kinerja dan efektivitas sistem secara keseluruhan.
-
Kemampuan beradaptasi: Aplikasi yang berbeda sering menuntut berbagai persyaratan kecepatan atau mengharuskan penyesuaian selama operasi. Itu FIRGELLI Kontroler kecepatan memberi Anda fleksibilitas untuk dengan mudah memodifikasi dan menyesuaikan kecepatan aktuator untuk memenuhi tuntutan unik dari setiap aplikasi. Adaptasi ini memberdayakan para insinyur untuk mengoptimalkan kinerja sistem dalam berbagai skenario.
-
Operasi yang lancar: Pengontrol kecepatan, terutama yang menggunakan teknologi modulasi lebar pulsa (PWM) yang dilakukan pengontrol kecepatan paling tepat, menawarkan keuntungan memberikan kontrol yang halus dan konsisten atas kecepatan aktuator. Operasi yang lancar ini sangat penting karena meminimalkan stres dan keausan mekanis pada aktuator, sehingga memperpanjang masa pakai layanannya.
-
Sinkronisasi: Aplikasi tertentu membutuhkan pergerakan yang disinkronkan di antara banyak aktuator. Dalam kasus seperti itu, pengontrol kecepatan memainkan peran penting dalam mempertahankan kecepatan yang konsisten di semua aktuator yang terlibat. Sinkronisasi ini memastikan koordinasi yang tepat dan operasi yang harmonis, menghasilkan kinerja dan fungsionalitas sistem yang dioptimalkan secara keseluruhan.
Apa suara pitch tinggi yang Anda dengar berasal dari pengontrol kecepatan saat Anda memutar kecepatan lebih rendah dan lebih rendah?
Suara bernada tinggi yang Anda dengar berasal dari pengontrol kecepatan saat Anda memutar kecepatan lebih rendah dan lebih rendah biasanya disebabkan oleh frekuensi switching dari teknik modulasi lebar pulsa (PWM) yang digunakan untuk mengatur kecepatan aktuator.
PWM melibatkan pengalihan catu daya dengan cepat ke motor dan mati pada frekuensi konstan. Ketika kecepatan berkurang, siklus tugas (persentase waktu sinyal dalam keadaan aktif) berkurang, menyebabkan motor menerima tegangan rata -rata yang lebih sedikit. Dalam beberapa kasus, frekuensi PWM atau harmoniknya dapat termasuk dalam kisaran pendengaran manusia yang terdengar (20 Hz hingga 20 kHz).
Suara dapat dihasilkan karena getaran kumparan motor atau komponen lain dalam pengontrol kecepatan, yang beresonansi pada frekuensi PWM atau harmoniknya. Getaran ini disebabkan oleh ekspansi cepat dan kontraksi medan magnet yang dihasilkan oleh arus listrik di kumparan motor saat mereka beralih di antara keadaan hidup dan mati.
Saat kecepatan lebih rendah, siklus tugas berkurang, dan motor menerima lebih sedikit daya selama setiap siklus switching. Perubahan daya ini dapat menyebabkan kebisingan yang terdengar menjadi lebih jelas. Selain itu, frekuensi resonansi tertentu dari sistem mungkin lebih rentan untuk menghasilkan kebisingan yang terdengar, tergantung pada karakteristik mekanis dan listrik motor dan pengontrol kecepatan.




