Memanfaatkan umpan balik untuk memastikan pergerakan yang tepat adalah kunci dalam proyek otomatisasi apa pun dari robot ke lift TV. Implementasi umpan balik yang tepat memungkinkan kontrol loop tertutup yang akurat dari Anda aktuator linier; Anda tidak perlu lagi memeriksa secara manual bahwa aktuator linier Anda pergi ke posisi yang tepat. Karena aktuator linier biasanya digunakan untuk memindahkan objek dari satu posisi ke posisi lain, umpan balik terpenting untuk diterima dari aktuator Anda adalah posisinya. Aktuator linier yang memiliki umpan balik posisi biasanya akan mengukur posisi menggunakan salah satu dari 3 sensor yang berbeda; potensiometer, sensor efek aula, dan sensor optik.
Potensiometer
Potensiometer adalah resistor variabel yang ketika digunakan dalam aktuator linier, resistance mereka berubah berdasarkan posisi aktuator. Potensiometer akan terdiri dari 3 pin seperti yang ditunjukkan di bawah ini, pin 1 adalah tegangan input, pin 3 adalah ground, dan pin 2 adalah resistor yang dapat disesuaikan. Anda dapat membaca output potensiometer dengan mengukur tegangan antara pin 2 dan ground, yang akan berubah saat aktuator bergerak. Untuk secara efektif Terapkan umpan balik ini, Anda harus memanfaatkan beberapa jenis pengontrol, seperti Arduino, untuk membaca nilai posisi ini saat aktuator bergerak.

Salah satu kekuatan terbesar dari potensiometer adalah memberikan indikasi posisi absolut dari aktuator linier. Karena itu, umpan balik ini bisa sangat mudah ditangani dalam perangkat lunak pengontrol karena Anda dapat dengan mudah membandingkan pembacaan output saat ini dengan pembacaan output dari posisi yang Anda inginkan. Anda juga tidak perlu khawatir kehilangan posisi aktuator Anda jika Anda mematikan sistem Anda karena resistensi potensiometer akan sama terlepas dari bertenaga atau tidak.

Ada beberapa kelemahan menggunakan potensiometer untuk umpan balik posisi. Salah satu kelemahannya adalah umpan balik dari potensiometer dapat dipengaruhi oleh kebisingan listrik dan mungkin mengharuskan Anda untuk menyaring sinyal untuk mencapai hasil yang stabil. Output dari potensiometer juga tergantung pada tegangan input ke potensiometer, yang mungkin menyulitkan untuk memastikan beberapa aktuator linier bergerak secara bersamaan karena sinyal output dapat sedikit berbeda karena sedikit perubahan pada tegangan input. Selain itu, potensiometer umumnya tidak akan sama peka terhadap gerakan yang lebih kecil dari aktuator linier, dibandingkan dengan opsi umpan balik lainnya, membuat hasil yang berulang lebih sulit.
Sensor Efek Hall
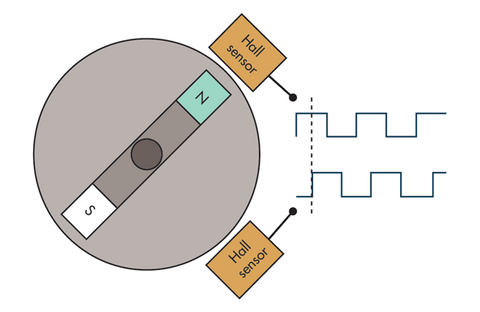
Sensor Efek Hall Pekerjaan berdasarkan efek Hall yang merupakan efek dari medan magnet untuk menghasilkan tegangan. Sensor efek Hall dapat memberikan output digital atau linier, tetapi untuk aktuator linier, mereka biasanya menggunakan sensor efek aula output digital. Ketika sensor -sensor ini mendeteksi medan magnet, mereka akan menghasilkan tegangan yang dapat dibaca oleh pengontrol [1]. Dengan aktuator linier, sensor -sensor ini diposisikan di dalam gearbox aktuator bersama dengan cakram magnetik. Saat aktuator linier bergerak, cakram magnetik ini berputar melewati sensor efek aula yang menghasilkan pulsa tegangan. Pulsa ini dapat digunakan untuk menentukan seberapa jauh aktuator telah pindah. Secara umum, aktuator linier yang menggunakan sensor efek Hall untuk memberikan umpan balik posisi akan menentukan pulsa per inci yang dapat Anda gunakan untuk menentukan seberapa jauh aktuator bergerak. Misalnya, jika Anda mendeteksi 6000 pulsa dan aktuator Anda memiliki denyut nadi per inci 12000 yang berarti aktuator Anda telah bergerak 0,5 inci.
Kelemahan utama menggunakan sensor efek aula untuk umpan balik posisi dibandingkan dengan potensiometer adalah bahwa sensor efek Hall tidak mengukur posisi absolut. Sebaliknya mereka menghasilkan pulsa yang dapat dihitung untuk menentukan seberapa jauh aktuator telah bergerak, yang mengharuskan Anda untuk mengetahui di mana aktuator mulai menentukan posisi absolut. Ini dapat diatasi dalam perangkat lunak pengontrol Anda, seperti di Arduino, dengan menyimpan posisi aktuator saat ini dan selalu memulai aktuator dari posisi yang diketahui, seperti ditarik sepenuhnya. Ini mungkin mengharuskan Anda untuk rumah aktuator ke posisi yang diketahui ini setiap kali Anda menyalakan sistem Anda.
Kekuatan menggunakan sensor efek aula untuk umpan balik posisi adalah bahwa ia memberikan resolusi yang jauh lebih besar dibandingkan dengan umpan balik dari potensiometer. Karena mungkin ada 1000 -an pulsa per inci gerakan, sensor efek Hall memberikan ketepatan dan keandalan dalam memposisikan aktuator linier Anda. Pulsa juga akan bervariasi dalam frekuensi berdasarkan kecepatan aktuator linier Anda yang berarti Anda dapat menggunakannya untuk mengukur kecepatan aktuator linier Anda. Sensor efek Hall juga memberikan kemampuan yang lebih besar untuk memastikan beberapa aktuator linier bergerak bersama secara bersamaan karena jumlah pulsa lebih akurat daripada tegangan potensiometer yang berubah. Memanfaatkan kami Pengontrol Aktuator FA-Sync-X, Anda bahkan dapat memastikan aktuator bergerak secara serempak terlepas dari beban.
Sensor optik
Sensor optik Yang digunakan dalam aktuator linier (ada jenis lain dari sensor optik) fungsi yang sangat mirip dengan sensor efek Hall kecuali mereka mendeteksi cahaya menggunakan fotodetektor [2]. Sensor optik bekerja dengan memiliki cahaya dari LED atau sumber cahaya lainnya dilewatkan melalui disk enkoder. Disk enkoder ini ditempatkan untuk memungkinkan cahaya melewatinya secara berkala. Di sisi lain disk adalah fotodetektor, yang mendeteksi cahaya ketika melewati slot dalam disk dan membuat sinyal output [3]. Saat aktuator bergerak, disk enkoder berputar dan cahaya terdeteksi oleh fotodetektor yang menghasilkan pulsa tegangan. Pulsa ini dapat digunakan mirip dengan pulsa sensor efek aula untuk menentukan seberapa jauh aktuator telah pindah. Aktuator linier yang menggunakan sensor optik untuk umpan balik posisi juga akan menentukan pulsa per inci yang dapat Anda gunakan untuk menentukan seberapa jauh aktuator bergerak.

Sensor optik, sekali lagi, memiliki kekuatan dan kelemahan yang sama dengan sensor efek Hall bila dibandingkan dengan potensiometer. Mereka memiliki akurasi dan resolusi yang lebih besar, bahkan lebih besar dari sensor efek Hall, dan dapat digunakan untuk mengukur kecepatan aktuator linier. Mereka juga lebih baik dalam memastikan beberapa aktuator linier Anda bergerak secara bersamaan dan dapat memanfaatkan Pengontrol Aktuator FA-Sync-X. Mereka juga tidak mengukur posisi absolut dan sebaliknya mengharuskan Anda menghitung pulsa untuk menentukan seberapa jauh aktuator Anda telah bergerak. Anda juga harus memulai dalam posisi yang diketahui karena Anda harus menyimpan posisi saat ini dalam perangkat lunak untuk melacak posisi absolut.
Ringkasan
Pilihan jenis umpan balik yang Anda inginkan dari Anda aktuator linier Akan tergantung pada apa yang Anda rasakan lebih penting untuk aplikasi Anda. Apakah Anda memerlukan tingkat akurasi yang tinggi? Pilih aktuator linier dengan sensor efek optik atau aula. Apakah Anda tidak ingin harus mengatur aktuator Anda ke posisi rumah setiap kali Anda menyalakannya? Kemudian pergi dengan aktuator linier dengan potensiometer. Apakah Anda ingin mengontrol beberapa aktuator linier secara bersamaan? Pilih aktuator linier dengan sensor efek optik atau aula. Apakah Anda ingin umpan balik Anda memberikan posisi absolut? Pergi dengan aktuator linier dengan potensiometer.
[1] Monari, G. (Juni, 2013) Memahami resolusi dalam encoder optik dan magnetik. Diterima dari: https://www.electronicdesign.com/technologies/components/article/21798142/understanding-resolution-in-optical-and-magnetic-encoders
[2] Paschotta, R. Artikel tentang sensor optik. Diterima dari:https://www.rp-photonics.com/optical_sensors.html



