این پروژه به شما نشان می دهد که چگونه می توانید از یک کنترل از راه دور Tivo و یک تخته Arduino استفاده کنید تا یک محرک خطی را برای بلند کردن نقاشی که یک تلویزیون را پوشش می دهد ، انجام دهید. در پایان فیلم را تماشا کنید
ابزارهای مورد نیاز
ابزارهای زیر برای تکمیل این پروژه مورد نیاز است.
- شماره 0 پیچ گوشتی فیلیپس
- آهن لحیم کاری
- لحیم کردن
- سیم بر، دم باریک
- انبردست های کوچک (من از انبردست استفاده کردم که برای کار با الکترونیک کوچک طراحی شده اند)
فهرست قطعات
قسمتهای زیر برای تکمیل این پروژه مورد نیاز است.
- محرک مسیر سنگین از Firgelli اتوماسیون
- کنترل از راه دور Tivo Roamio
- Arduino Uno Rev 3
- جعبه پروژه Hammond 1591ESBK ABS سیاه (7.5 "x 4.3" x 2.2 ")
- Microtivity IB171 170 امتیاز نان مینی برای Arduino
- گیرنده مادون قرمز 2.5-5.5 ولت 38kHz
- 100pcs مایکل جاش 20 سانتی متر M/F سیمهای جامپر سیم کابل 1 پین پلاگین مرد به زن
- ماژول رله 2 کانال Sainsmart
- کابل USB 2.0-A-Male to B-Male
- 4 فوت سیم آبپاش سیاه 18/5
- پیچ های دستگاه ضد زنگ 8 Qty #4-40 x 2 "(من آنها را از Home Depot خریداری کردم)
- 8 qty Everbuilt #4-40 آجیل پیچ ماشین (من آنها را از Home Depot خریداری کردم)
- 16 Qty ½ ”فاصله نایلونی (من آنها را از Home Depot خریداری کردم)
- 1 qty zip کراوات
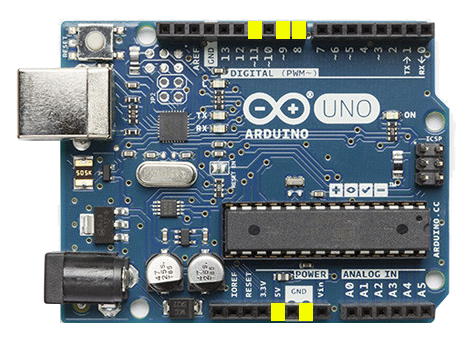
تنظیم Arduino Uno Rev 3
ما از پین های زیر در صفحه آردوینو که به رنگ زرد برجسته شده است استفاده خواهیم کرد.
- قدرت 5 ولت
- شماره 8 دیجیتال
- شماره 9 دیجیتال
- دیجیتال شماره 11
- GND قدرت
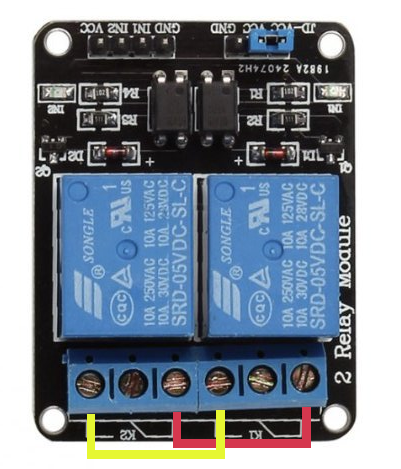
تنظیم ماژول رله 2 کانال Sainsmart
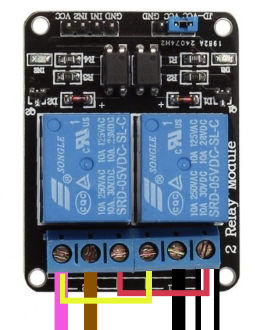
ما باید ماژول رله Sainsmart را همزمان کنیم تا همزمان با Firgelli اتوماسیون محرک خطی. یک بلوز آبی از JD-VCC تا VCC وجود دارد. این را در جای خود قرار دهید.
موقعیت k1 k1 موقعیت 1 تا K2 موقعیت 1
یک سیم بلوز را از موقعیت اول در رله K1 به موقعیت اول در رله K2 قرار دهید. بلوز ما به رنگ قرمز نشان داده شده است.

موقعیت k1 k1 موقعیت 3 تا K2 موقعیت 3
یک سیم بلوز را از موقعیت سوم در رله K1 به مقام سوم در رله K2 قرار دهید. بلوز ما به رنگ زرد نشان داده شده است.

هنگامی که به درستی پرید ، باید پیکربندی زیر را مشاهده کنید.
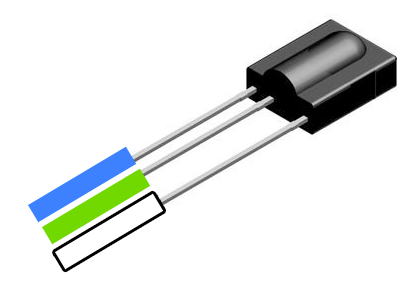
تنظیم سنسور مادون قرمز
سنسور مادون قرمز دارای سه سیم است که از آن خارج می شوند. یکی برای سیم زمینی است ، دیگری برای سیم 5 ولت و سوم سیگنال را به صفحه آردوینو ما ارسال می کند.
دو اینچ از سپر بیرونی را روی سیم 18-5 آبپاش به عقب برگردانید تا سیم های رنگی در داخل آن قرار بگیرد. ما فقط از سیم های سبز ، سفید و آبی استفاده خواهیم کرد ، بنابراین دیگران را قطع خواهیم کرد ، بنابراین مجبور نیستیم با آنها آشفتگی کنیم.
بر روی هر یک از سیمهایی که از آنها استفاده خواهیم کرد ، از عایق استفاده کنید. اینها با استفاده از پیکربندی زیر به رله لحیم می شوند. هنگام نگاه کردن به سنسور از بالا با دست انداز گرد بر شما:
- سیم آبی را به ترمینال سمت چپ لحیم کنید.
- سیم سبز را به ترمینال میانی لحیم کنید.
- سیم سفید را به ترمینال سمت راست لحیم کنید.
تنظیم سیم کشی محرک خطی
محرک خطی با کنترل از راه دور سیمی با دو دکمه مثلث همراه است. یک دکمه سوئیچ را فعال می کند که محرک خطی را به سمت بالا حرکت می دهد و دیگری آن را به سمت پایین حرکت می دهد.
بدنه کنترل از راه دور برد مدار را بردارید
اولین چیز این است که سیم ها را در پشت کنترل از راه دور باز کنید. اینها باید با پیچ گوشتی شماره 0 فیلیپس برداشته شوند.
برد مدار را از بدنه کنترل از راه دور جدا کرده و سیم ها را بررسی کنید. با نگاه کردن به آن از پایین باید چهار سیم را به تخته لحیم کند. از چپ به راست آنها سیاه ، سفید ، بنفش و قهوه ای مانند شکل زیر هستند.
اگر به دلایلی از رنگهای مختلف استفاده می کردند ، به سادگی رنگ ها را به همان ترتیب زیر پیگیری کنید.
سیمها
با استفاده از آهن لحیم کاری ، سیمها را از روی برد مدار جدا کنید. به آرامی نوک آهن لحیم کاری را روی لحیم کاری موجود در نقطه لحیم کاری فشار دهید تا آن را شل کرده و با استفاده از یک جفت کوچک از انبردست به آرامی سیم را از نقطه لحیم کاری بکشید.
سیم ها را به رله ها وصل کنید
اکنون سیم ها را از کنترل از راه دور سیمی به رله 2 کانال Sainsmart وصل خواهیم کرد. برای شل کردن ترمینال از پیچ گوشتی شماره 0 فیلیپس استفاده کنید و سپس آن را به پایین محکم کنید تا سیم ایمن شود.
- سیم سفید به موقعیت K1 1 می رود
- سیم سیاه به موقعیت K1 2 می رود
- سیم قهوه ای به موقعیت K2 2 می رود
- سیم بنفش به موقعیت K2 3 می رود
توجه: سیمهای بلوز موجود را حذف نکنید. هنگام پیچیدن در پایانه ها ، آنها را بگذارید.
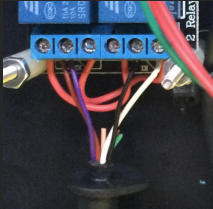
پس از اتمام ، باید مانند تصاویر فوق باشد.
سیم کشی تخته نان
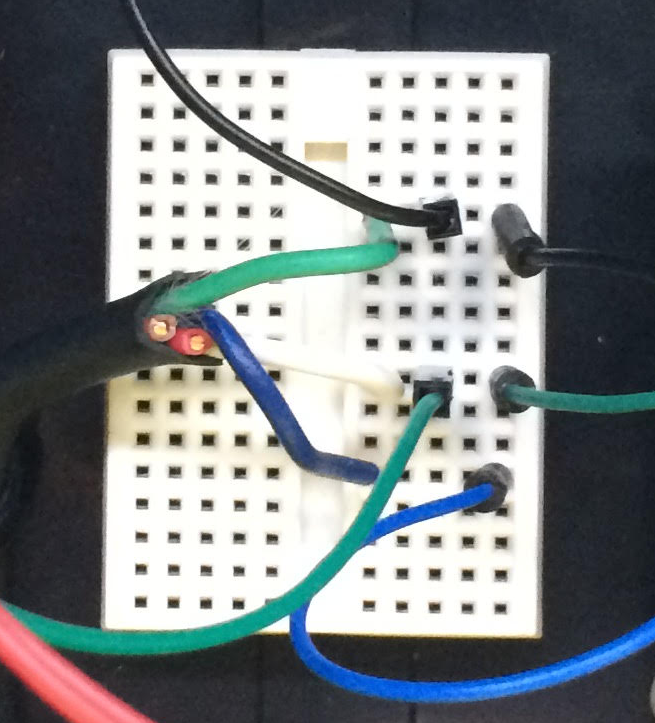
اکنون تخته آردوینو را به تخته نان وصل خواهیم کرد. تخته نان به ما اجازه می دهد تا اتصالات را در جایی که چندین اتصالات به یک ترمینال در آردوینو یا رله وجود دارد ، بلوز کنیم.
هر ردیف سوراخ به هم وصل می شود و به ما این امکان را می دهد تا همه چیز را در آن ردیف بلوز کنیم. در اینجا مواردی است که ما برای سیم کشی نیاز داریم.
قدرت 5 ولت
- از یک سیم بلوز زن و مرد از ترمینال 5V Power در Arduino به یک ردیف بلااستفاده روی تخته نان استفاده کنید. آن را به یک سوراخ در ردیف فشار دهید.
- از یک سیم بلوز زن و مرد از همان ردیف روی تخته نان تا ترمینال VCC در رله 2 کانال Sainsmart استفاده کنید. آن را به یک سوراخ در همان ردیف فشار دهید.
- در معرض سیم سفید از طرف دیگر سیم 18-5 آبپاش قرار بگیرید. آن را به یک سوراخ در همان ردیف فشار دهید.
زمین
- از یک سیم بلوز زن و مرد از ترمینال Power GND در Arduino به یک ردیف بلااستفاده روی تخته نان استفاده کنید. آن را به یک سوراخ در ردیف فشار دهید.
- از یک سیم بلوز زن و مرد از ترمینال GND در رله 2 کانال Sainsmart به سوراخی در همان ردیف سیم GND استفاده کنید. آن را به سمت سوراخ در همان ردیف فشار دهید.
- در معرض سیم سبز از طرف دیگر سیم 18-5 آبپاش قرار بگیرید. آن را به یک سوراخ در همان ردیف فشار دهید.
سیگنالینگ
- از یک سیم بلوز زن و مرد از ترمینال شماره 11 دیجیتال در Arduino به یک ردیف بلااستفاده روی تخته نان استفاده کنید. آن را به یک سوراخ در ردیف فشار دهید.
- در معرض سیم آبی از طرف دیگر سیم 18-5 آبپاش قرار بگیرید. آن را به یک سوراخ در همان ردیف فشار دهید.
پس از اتمام ، تخته نان باید چیزی شبیه به تصویر زیر باشد.
برنامه کنترل را روی Arduino نصب کنید
شما نیاز به بارگیری و نصب آن دارید arduino ideبشر پس از بارگیری و نصب IDE ، IDE را باز کنید.
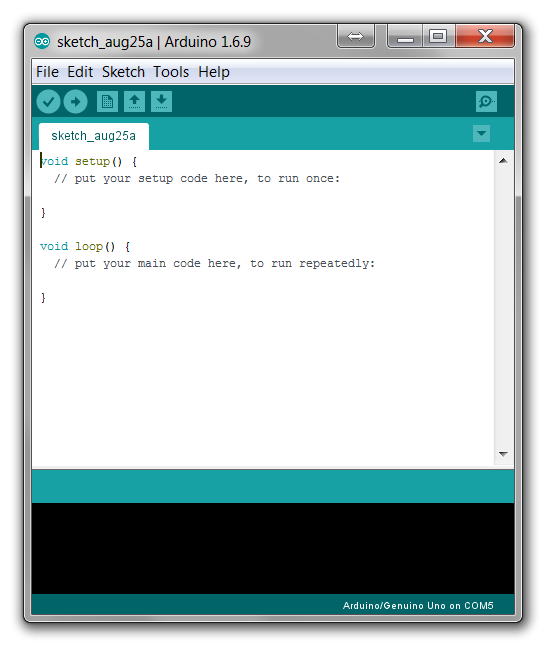
کد را در IDE کپی و چسباند
کد منبع را از آن بارگیری یا کپی کنید گیتوب و آن را در پنجره IDE بچسبانید که باید در صورت انجام این کار شبیه به این باشد.
پرونده Irremote.cpp را تنظیم کنید
پرونده ای در پرونده های C: \ برنامه (x86) \ arduino \ کتابخانه ها \ robotirremote \ src \ دایرکتوری وجود دارد که دارای مسئله کد منبع است که مانع از تهیه کد منبع GitHub می شود. فایل Irremotetools.cpp را در یک ویرایشگر متن ساده مانند Notepad باز کنید و خط زیر را تغییر دهید:
خط 5 باید به نظر برسد:
int recv_pin = tkd2 ؛ // پین گیرنده IR به
آن را به موارد زیر تغییر داده و پرونده را ذخیره کنید.
int recv_pin = 11 ؛ // پین گیرنده IR به
Arduino را با استفاده از کابل USB به رایانه خود وصل کنید
تخته های آردوینو ، تخته نان و رله را روی یک سطح غیر رسانا مانند میز چوب قرار دهید.
طرف مستطیل کابل USB را به رایانه و طرف "D" به صفحه Arduino وصل کنید.
بندر را انتخاب کنید
Tools - Port Menu را انتخاب کنید و موردی را انتخاب کنید که صفحه Arduino خود را نشان می دهد.
کد را بارگذاری کنید
برای بارگذاری کد در Arduino ، مورد منو را بارگذاری کنید.
کد را امتحان کنید
پس از بارگذاری کد ، سیم سیم را از آن وصل کنید Firgelli اتوماسیون محرک خطی به محرک باز می گردد و محرک را وصل می کند.
صفحه Arduino را از طریق کابل USB به رایانه خود وصل کنید.
کنترل از راه دور Tivo خود را روی سنسور مادون قرمز قرار دهید و روی دکمه Green Thumb "Like" کلیک کنید. محرک باید بالا برود.
کنترل از راه دور Tivo خود را روی سنسور مادون قرمز قرار دهید و روی دکمه قرمز انگشت شست "دوست نداشتن" کلیک کنید. محرک باید به پایین حرکت کند.
جعبه آن همه بالا
من از جعبه پروژه Hammond به همراه پیچ های دستگاه ، فاصله ها و آجیل پیچ ماشین استفاده کردم تا تابلوهای مدار خود را در خود جای دهم. من از یک نوک نقطه روی آهن لحیم کاری استفاده کردم تا سوراخ ها را از طریق جعبه پلاستیکی سیاه چسباند و همچنین برای سیم ها از طرفین جایی ایجاد کنم. من از کراوات زیپ استفاده کردم تا سیم برای سنسور مادون قرمز از بیرون کشیده شود. سیم های کنترل در Firgelli اتوماسیون محرک خطی یک تکه لاستیکی داشته باشید تا از بیرون کشیدن آنها جلوگیری شود ، بنابراین من توانستم از آن استفاده کنم.
درباره نویسنده
ریچارد باگدوناس یک متخصص ادغام داده ها با بیش از 15 سال تجربه ادغام با نقطه فروش ، سوابق بهداشت الکترونیکی ، مدیریت ارتباط با مشتری و سیستم های مدیریت انبار است. ریچارد از زمان کودکی با الکترونیک سر و صدا کرده است و این اولین پروژه آردوینو است.
ریچارد در حال حاضر ارشد معمار مراقبت های بهداشتی در MI7 است و در آنجا نظارت بر ادغام شرکت با سیستم های سلامت الکترونیکی را دارد.



