بعد از اتمام LED های چشمک زن به روش های کاملاً منحصر به فرد و شگفت انگیز ، می خواهید در واقع با محیط فیزیکی ارتباط برقرار کنید. اینجا جایی است که محرک های خطی وارد می شوند. اگر می خواهید چیزی را جابجا کنید ، چیزی را باز کنید ، چیزی را محوری کنید ، یک محرک خطی به احتمال زیاد بهترین راه برای انجام آن است. و چرا وقتی می توانید یک محرک خطی برای انجام کار سخت انجام دهید ، بلند کردن ، حرکت و محوری خود را محوری کنید.
مطمئناً می توانید یک دکمه را بر روی کنترل از راه دور یا سوئیچ راک فشار دهید ، اما چرا یک سنسور حرکتی یا حتی یک ساعت زمان واقعی برای رویدادهای مبتنی بر زمان ندارید.
اگر تازه وارد Arduino شده اید ، ممکن است توجه داشته باشید که فقط نمی توانید یک موتور بزرگ را به پین های تخته وصل کنید و شروع به حرکت آن کنید. برای حمل بار جریان زیاد باید از مکانیسم سوئیچینگ استفاده کنید. شما می توانید از درایور موتور یا H-Bridge استفاده کنید ، اما ساده ترین و سریعترین راه استفاده از رله های زوج یا یک تخته رله است. شما هنگام استفاده از Arduino با یک محرک خطی دو گزینه دارید. شما فقط می توانید از صفحه رله برای کنترل قدرت رفتن به محرک بدون اطلاعات موقعیتی استفاده کنید ، یا اگر از یکی از محرک های بازخورد FA-PO استفاده می کنید می توانید موقعیت شافت را تعیین کرده و یک کنترل موقعیت حلقه بسته ایجاد کنید. در این مقاله ما قصد داریم روی گزینه Simply تر ، فقط با استفاده از رله ها برای کنترل محرک و بدون اطلاعات موقعیتی متمرکز شویم.
اطمینان حاصل کنید که از رله (یا صفحه رله) با رله های SPDT استفاده می کنید. رله های SPDT (تک قطب تک قطب) برای هر رله سه اتصال دارند. مشترک ، به طور معمول باز ، به طور معمول بسته. ما در مورد رله های مقاله دیگری به جزئیات بیشتری خواهیم پرداخت ، فقط مطمئن شوید که رله های SPDT را دریافت می کنید در غیر این صورت کار نمی کند. برای کنترل محرک به دو رله SPDT نیاز دارید. با دو رله SPDT می توانید شروع ، متوقف و تغییر جهت محرک کنید.
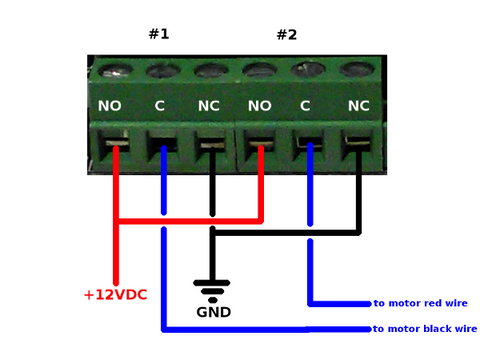
همانطور که در نمودار سیم کشی در زیر مشاهده می کنید ، زمین 12VDC خود را به ترمینال معمولی بسته دو رله وصل می کنید و +12VDC خود را به ترمینال معمولی باز دو رله وصل می کنید. می توانید یک اتصال برای تقسیم هر سیم به دو صورت یا از سیم بلوز کوتاه استفاده کنید. شما دو سیم محرک را به ترمینال مشترک ، یکی به هر رله وصل می کنید.
برای کد Arduino ، بیایید فرض کنیم پین های دیجیتال 2 و 3 برای کنترل دو رله هستند. شما باید بررسی کنید که در هیئت مدیره شما چیست. در اینجا یک قطعه کد ساده وجود دارد که نشان می دهد چگونه می توانید محرک خطی را گسترش دهید ، جمع کنید و متوقف کنید.
const int RELAY_1_A = 2; const int RELAY_1_B = 3; void setup() { pinMode(RELAY_1_A, OUTPUT);در نظر گرفتن فعال کننده) {pinMode(RELAY_1_B, OUTPUT);} خالی loop() { //This is where your program logic goes //You can call the functions to control the //actuator here, as well as reading sensors, etc.. } خالی extendactuator (در نظر گرفتن محرک) {// تنظیم یک رله یکی و دیگری خاموش // این حرکت را گسترش می دهد نوشتن(Relay_1_a ، عالی); نوشتن(Relay_1_B ، کم); } خالی جمع کننده (
// تنظیم یک رله و دیگری روی آن
// این باعث می شود که محرک محرک باشد
نوشتن(Relay_1_a ، کم);
نوشتن(Relay_1_B ، عالی);
}
خالی StopActuator (در نظر گرفتن فعال کننده) {
// تنظیم هر دو رله
// این باعث می شود که محرک در یک ترمز باشد
نوشتن(Relay_1_a ، کم);
نوشتن(Relay_1_B ، کم); }
این باید شما را با استفاده از یک آردوینو (یا میکروکنترلر دیگر) با رله ها برای کنترل a ادامه دهد Firgelli اتوماسیون محرک خطی.
اگر به دنبال شروع کار خطی هستید ، با ما تماس بگیرید یا از طریق خط فنی ما برای ما ایمیل بفرستید. اگر به دنبال یک محرک اسب بخار محکم هستید ، بررسی کنید محرک های خطی سری Duty Light ما حمل می کنیم ، یا واحدهای وظیفه سبک با بازخورد پتانسیومتربشر یک منبع تغذیه خوب 12VDC را فراموش نکنید که می تواند بارهای القایی را تحمل کند. MB1 براکت برای محرک های خطی (MB1 برای سری FA-150) وقت و ناامیدی زیادی را برای شما صرفه جویی می کند.



