"Warum bewegen sich meine Aktuatoren nicht synchron, wenn sie an dieselbe 12-V-Stromversorgung angeschlossen sind?"

Viele Kunden verlassen sich auf Firgelli-Linearantriebe, um das Anheben des Lukendeckels an ihrem LKW zu automatisieren, eine Falltür zum Weinkeller zu verbergen oder einen zu betätigen Druckluftbremse an einem Lamborghini. Um diese Projekte zu erreichen, können zwei Aktuatoren auf beiden Seiten der Luke platziert werden, um sie anzuheben. Manchmal teilt uns ein Kunde jedoch mit, dass entweder die Luke gebrochen ist oder der Motor durchgebrannt ist, weil sich die Aktuatoren nicht mit der gleichen Geschwindigkeit bewegt haben.
Was ist los? Glücklicherweise können wir zuversichtlich sagen, dass dies kein Konstruktionsfehler in unseren Linearantrieben ist, sondern eine inhärente Eigenschaft aller Gleichstrommotoren. Ob bei uns oder bei einem Mitbewerber, zwei Gleichstrommotoren wird sich nie perfekt synchron bewegen miteinander ohne geschlossene Rückkopplungsschleife mit einem Encoder.
Hierfür gibt es zahlreiche Gründe, unter anderem:
- Fertigungstoleranzen, die kleine Abweichungen zulassen
- Auf jede Motorwelle wirken unterschiedliche Lasten / Drehmomente
- Variationen in der Buchsen- / Lagerreibung
- Unterschiede im mechanischen Verschleiß
Diese kleinen Unterschiede addieren sich und es ist realistisch, einen Drehzahlunterschied von 5 bis 10% zwischen Gleichstrommotoren oder Linearantrieben zu erwarten. Glücklicherweise gibt es verschiedene Methoden, um diesen inhärenten Geschwindigkeitsunterschied zu überwinden.
So betreiben Sie Linearaktuatoren mit der gleichen Geschwindigkeit
Wenn Sie a gekauft haben (oder planen) a Linearantrieb der Rückkopplungsstange, Linearantrieb mit optischer Rückkopplung, Aufzählungsserie 36 Cal, oder Bullet Serie 50 Cal LinearantriebIn diesem Abschnitt finden Sie Informationen zum synchronen Verschieben.
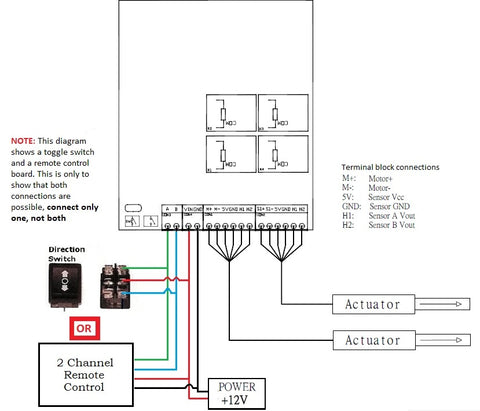
1) FA-SYNC-4 oder FA-SYNC-2 Synchronbox (wärmstens empfohlen)
Das Synchronsteuerbox ist bei weitem die zuverlässigste Methode zur Synchronisation der Bewegung von zwei bis vier Linearantrieben. Sie benötigen denselben Aktuatortyp ausschließlich aus der folgenden Liste:
- Optische Serie 200lb Aktuator
- Optische Serie 400lb Aktuator
- 12V Bullet Series 36 Cal. Aktuator
- 12V Bullet Series 50 Cal. Aktuator
Diese Steuerbox bietet eine Plug-and-Play-Lösung von der Stange. Sobald sie miteinander verbunden ist, müssen Sie nur noch einen Knopf drücken und das System wird automatisch kalibriert. Anschließend können Sie intuitiv bis zu 4 Aktuatoren synchron unter beliebigen Bedingungen steuern Belastung. Sehen Dies spezielles Tutorial zur Verwendung der Synchronsteuerboxen FA-SYNC-2 und FA-SYNC-4.
2) Arduino Interrupt Pins
Diese Methode funktioniert mit den Serien Optical und Bullet. Diese Aktuatoren verfügen über optische bzw. Hall-Effekt-Encoder. Durch Zählen der Anzahl der Impulse kann die Stabverschiebung berechnet werden. Das Anwenden von Steueralgorithmen ermöglicht die synchrone Steuerung. Dazu müssen Sie das Signal von den Encodern an die Interrupt-Pins des Arduino anschließen. Dies ist ein fortgeschrittenes Projekt; Wir bieten keine Unterstützung für Software oder Programmierung.
3) Arduino-Analogstifte
Diese Methode funktioniert nur mit Linearantrieb der Rückkopplungsstange. Der Linearantrieb der Rückkopplungsstange verfügt über ein eingebautes Potentiometer, das einen analogen Ausgang bietet, der gelesen und in einen Positionsmesswert umgewandelt werden kann. Ein Tutorial dazu mit einem Arduino ist verlinkt Hier; während dieses Tutorial gründlich ist, wird einige Kenntnisse der Programmierung und Arduino angenommen. Darüber hinaus zeigt dieses Tutorial nur, wie man einen Lesewert vom Sensor erhält; Es liegt an Ihnen, Software für die synchrone Steuerung zu schreiben. Dies ist ein fortgeschrittenes Projekt; wir bieten keine Unterstützung für Software oder Programmierung.
Wie man Linearantriebe mit (fast) der gleichen Geschwindigkeit läuft
In diesem Abschnitt wird erläutert, wie Lineuatoren bewegt werden, die nicht über eingebaute Encoder zur Feedback-Steuerung verfügen. Wenn Sie Ihre Linearantriebe noch nicht gekauft haben, empfehlen wir, diesen Abschnitt zu überspringen und an den im vorherigen Abschnitt beschriebenen Methoden festzuhalten, die Firgelli-Linearantriebe mit eingebauten Positionsgebern verwenden. Wenn Sie jedoch bereits einen Linearantrieb erworben haben, der nicht über diese eingebauten Positionsgeber wie die Firgelli Classic Oder Firgelli Premium linearen Aktuatoren und wollen sie immer noch mit (fast) der gleichen Geschwindigkeit bewegen, lesen Sie diesen Abschnitt weiter.
Hinweis: Wir sagen immer wieder (fast) die gleiche Geschwindigkeit, weil es physisch unmöglich ist, Aktoren mit genau der gleichen Geschwindigkeit ohne Closed-Loop-Feedback-Steuerung zu bewegen.
1) Nichts tun
Die einfachste Lösung kann nicht über die kleine 5-10% Unterschied in der Geschwindigkeit zu kümmern, vor allem, wenn der Schlag Ihres Aktuators klein ist (<6 Zoll), da sie in der Höhe nicht zu drastisch unterscheiden. Stattdessen bringen Sie eine gewisse Flexibilität in Ihr System, zum Beispiel, wenn Sie eine Luke mit zwei Aktuatoren bauen, können Sie es so entwerfen, dass der Körper der Luke leicht drehen / drehen kann, so dass jeder Unterschied in der Aktuatorgeschwindigkeit vom System absorbiert wird.
2) Geschwindigkeitsregler
Wenn sich ein Aktuator schneller bewegt als der zweite, können Sie Geschwindigkeitsregler auf dem schnellen Aktuator, um seine Geschwindigkeit zu reduzieren. Diese Steuerbox verwendet Pulsweitenmodulation (PWM), um die Geschwindigkeit einzustellen, mit der sich ein Aktor bewegt. Weitere Informationen finden Sie in unserem Tutorial: Verwendung von Drehzahlreglern mit Firgelli LinearAktuatoren. Das Tuning der Geschwindigkeit ist eine Kunstform und führt nicht zu einer perfekten Geschwindigkeitsabstimmung zwischen mehreren Aktoren, aber es ist das bestmögliche Ergebnis, wenn Feedback nicht verwendet wird.
3) Arduino Geschwindigkeitskontrolle
Anstatt unseren Off-the-Shelf-Geschwindigkeitsregler zu verwenden, können Sie einen Arduino verwenden, um die Geschwindigkeit von Aktoren mit einem PWM-Signal zu variieren. Wir empfehlen diese Methode nicht, wenn Sie noch keine Erfahrung mit Arduino haben. Während Firgelli keine Arduino- oder Programmierunterstützung bietet, haben wir eine Übersicht Wie man die Geschwindigkeit mit einem Arduino und einem Motortreiber variiert.



