Was ist ein Arduino?
Arduino ist eine Open-Source-Elektronik-Prototyping-Plattform, die auf flexiblen, benutzerfreundlichen Hardware und Software basiert. Es ist für DIY -Projekte, Künstler, Designer, Hobbyisten und alle, die daran interessiert sind, interaktive Projekte zu erstellen, gedacht. Arduinos sind Mikrocontroller -Boards, die alles enthalten, was Sie benötigen, um einfach mit dem Mikrocontroller zu verkaufen. Ein Mikrocontroller ist wie ein Mini-Computer für eingebettete Systeme, und die Art des eingeschlossenen Mikrocontrollers hängt vom Arduino-Stil ab. Arduino reicht von den größeren Arduino Mega zur mittelgroßen Arduino uno zu den kleineren Arduino Pro Mini. Die verschiedenen Größenplatten bieten eine zunehmende Anzahl von E/A -Stiften und zusätzliche Funktionen, und die beliebtesten dieser Boards sind die UNO. Arduino bietet außerdem eine Open -Source -KOSTENLOS, um Ihre Mikrocontroller mit IDE zu programmieren. Die Arduino IDE verwendet eine leicht verständliche Programmiersprache. Aufgrund der Beliebtheit von Arduino finden Sie viele hilfreiche Beispiele online, um Ihnen beim Code für Ihre spezifische Anwendung zu helfen. Wenn dies Ihr erstes Arduino -Projekt ist, ist das Arduino Kit Stellen Sie Ihnen alles zur Verfügung, was Sie benötigen, von Pulloverkabeln über Sensoren bis hin zu Relais, und enthält Arduino Uno, um Ihnen den Einstieg zu erleichtern.

Warum einen Arduino verwenden, um einen linearen Aktuator zu steuern?
Einer der größten Vorteile bei der Verwendung eines Arduino oder einem Mikrocontroller, um a zu kontrollieren Linearantrieb ist, dass Sie eine größere Kontrolle über Ihren linearen Aktuator haben. Mit Mikrocontrollern können Sie komplexere Eingaben von Sensoren oder anderen Geräten verwenden, um Ihren linearen Aktuator zu steuern. Sie ermöglichen es Ihnen, Echtzeitberechnungen vorzulegen, um Ihre zu positionieren Aktuator In der idealen Position oder implementieren Sie Timer, um Positionsänderungen Ihrer Aktuatoren zu automatisieren. Mikrocontroller können auch Feedback Ihrer Aktuatoren aufnehmen, um eine genauere Position und die Geschwindigkeitskontrolle bereitzustellen und mehr als einen Aktuator gleichzeitig zu steuern. Einfach ausgedrückt, bieten Mikrocontroller Ihnen eine größere Kontrolle und Flexibilität. Mit Arduino von Arduino ist das Niveau der zusätzlichen Komplexität minimal.
Kontrolle eines linearen Aktuators mit einem Arduino
Sie können Ihren linearen Aktuator nicht direkt in einen Arduino übertragen, wie Sie es mit einem Schalter können, da die Betriebsspannung des Arduino nur 5 V beträgt und sehr kleine Stromgrenzen hat. Sie müssen eine Zwischenkomponente verwenden, um den linearen Aktuator zu steuern, der entweder mit Relais oder einem Motorfahrer durchgeführt werden kann.
Staffeln
Wie besprochen Hier, Staffeln sind elektromagnetische Schalter, die durch Energieversorgungsschalter kontrolliert und entstern werden, um den Schalter zu öffnen und zu schließen. Der Arduino kann verwendet werden, um das Relais durch Energieversorgungs und Verstärkung der Spule mit einem E/A-Pin zu kontrollieren. Abhängig von der Art des Relais, den Sie verwenden, ändert sich die Kontrolle über Ihren linearen Aktuator, aber die Vernetzung mit dem Arduino ist ziemlich geradlinig. Setzen Sie die Spule nur mit einem E/A -Pin an. Sie müssen sicherstellen, dass sich die Nennspannung der Spule um die Betriebsspannung des Arduino (5 V) befindet, oder der Arduino kann die Spule nicht so energiegeladen, um den Schalter zu schließen.
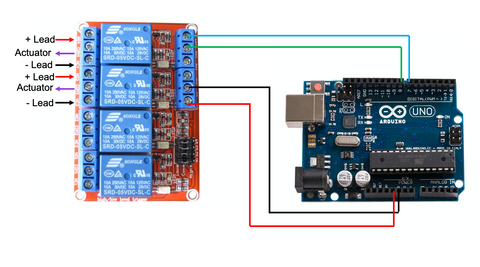
Oben ist ein Beispiel für eine Arduino -Schnittstelle mit einer zwei SPDT -Relais -Konfiguration. In dieser hier beschriebenen Konfiguration werden die beiden Relais verwendet, um die Polarität der Spannung auf den linearen Aktuator umzudrehen und die Leistung dem Aktuator zu trennen. Im Codebeispiel ist nachstehend angezeigt, dass der Arduino das obere Relais mit Strom versorgt, um den Aktuator 2 Sekunden lang zu erweitern, indem Pin 7 auf niedrig eingestellt wird, und dann den Aktuator 2 Sekunden lang durch Dezieren des oberen Relais durch Einstellen beider Stifte auf hoch. Um den Aktuator zurückzuziehen, wird der Arduino das zweite Relais für 2 Sekunden lang mit Strom versorgen, indem er Pin 8 auf niedrig einstellt, und dann den Aktuator 2 Sekunden lang anhalten, indem sie erneut alle Stifte auf hoch einstellen. Da sich dieser Code im Schleifenabschnitt des Programms befindet, wiederholt der Arduino diesen Code immer wieder. Natürlich können Sie eine elegantere Codierungslösung für Ihre Anwendung implementieren. Wenn Sie jedoch noch mehr Kontrolle suchen, möchten Sie einen Motorfahrer verwenden.
https://gist.github.com/OMikeGray/6bf644b6cda85bfe8c898ccd44ec6d78
/* Firgelli Automations
* Limited or no support: we do not have the resources for Arduino code support
*/
void setup() {
pinMode(7, OUTPUT); // Configure pin 7 as an Output
pinMode(8, OUTPUT); // Configure pin 8 as an Output
digitalWrite(7, HIGH); // Initialize pin 7 as Low
digitalWrite(8, HIGH); // Initialize pin 7 as Low
}
void loop() {
// Extend Linear Actuator
digitalWrite(7, LOW);
digitalWrite(8, HIGH);
delay(2000); // 2 seconds
// Stops Actuator
digitalWrite(7, HIGH);
digitalWrite(8, HIGH);
delay(2000); // 2 seconds
// Retracts Linear Actuator
digitalWrite(7, HIGH);
digitalWrite(8, LOW);
delay(2000); // 2 seconds
// Stop Actuator
digitalWrite(7, HIGH);
digitalWrite(8, HIGH);
delay(2000); // 2 seconds
}Kraftfahrer
A Kraftfahrer ist ein integriertes Schaltungsdesign speziell für die Steuerung von DC -Motoren, die DC -lineare Aktuatoren antreiben. Motorfahrer verwenden üblicherweise eine H-Brücke, um sowohl die Richtungs- als auch die Geschwindigkeitsregelung zu ermöglichen. Wie Sie Ihren Arduino genau an Ihren Motor -Treiber anschließen, hängt von dem genauen Motorrad -Treiber ab, benötigt dafür jedoch mindestens zwei E/A -Stifte, und eines davon ist ein PWM -Signal. Die PWM- oder Impulsbreitenmodulation ist eine Methode, um ein Signal zwischen den Ein- und Ausschaltwerten zu variieren, um eine niedrigere als die Betriebsspannung effektiv zu liefern. Der Motorfahrer kann dieses Signal verwenden, um die Geschwindigkeit anzupassen, mit der der Motor ausgeführt wird.
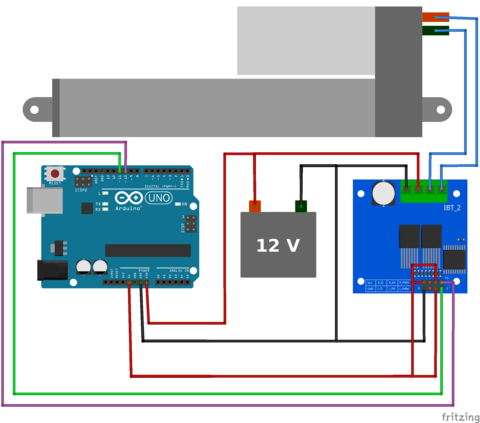
Oben ist ein Beispiel für unsere Hochstrom -DC -Motorantrieb mit einem Arduino verbunden. Für diesen Motorfahrer müssen Sie zwei PWM -Signale senden, um den Aktuator und den anderen zum Rückzug zu erweitern. Das PWM wird als vorzeichenloses Byte angegeben, was bedeutet, dass es von 0, keine Spannung bis 255, Maxspannung (5 V) reicht, die proportional zur Geschwindigkeit des Motors ist. Da PWM kein binärer Wert ist, müssen wir die PWM -Stifte des Arduino verwenden und die analoge Schreibfunktion verwenden, wie im folgenden Beispiel zu sehen ist. PWM -Stifte werden auf dem Arduino mit einem ~ oder einfach als PWM -Stifte gekennzeichnet.
https://gist.github.com/OMikeGray/c4e0196704a4d62db5507ad8297708f4
/* Firgelli Automations
* Limited or no support: we do not have the resources for Arduino code support
*
* Program demos how a motor driver controls direction & speed of a linear actuator
*/
byte Speed = 0; // Intialize Varaible for the speed of the motor (0-255);
int RPWM = 10; //connect Arduino pin 10 to IBT-2 pin RPWM
int LPWM = 11; //connect Arduino pin 11 to IBT-2 pin LPWM
void setup() {
pinMode(10, OUTPUT); // Configure pin 10 as an Output
pinMode(11, OUTPUT); // Configure pin 11 as an Output
}
void loop() {
// Extend Actuator at Full Speed
Speed = 255;
analogWrite(RPWM, 0);
analogWrite(LPWM, Speed);
delay(2000); // 2 Seconds
// Stop Actuator
analogWrite(RPWM, 0);
analogWrite(LPWM, 0);
delay(2000); // 2 Seconds
// Retract Actuator at Half Speed
Speed = 127;
analogWrite(RPWM, Speed);
analogWrite(LPWM, 0);
delay(2000); // 2 Seconds
// Stop Actuator
analogWrite(RPWM, 0);
analogWrite(LPWM, 0);
delay(2000); // 2 Seconds
In dem obigen Codebeispiel erweitert der Arduino den Aktuator zwei Sekunden lang mit voller Geschwindigkeit, indem der Motorfahrer den vollen 5 -V -Pin 10 an den LPWM -Pin am Motorfahrer ausschickt. Anschließend stoppt der Arduino den Aktuator, indem er kein Signal an den Eingangsstift des Motor -Treibers sendet. Der Arduino zieht dann den Stellantrieb mit einer halben Geschwindigkeit zurück, indem er das Motor -Treibersignal sendet, das halb ein und halb von Pin 11 auf RPWM -Pin am Motorfahrer ist. Dann stoppt der Aktuator wieder. Da sich dieser Code im Schleifenabschnitt des Programms befindet, wiederholt der Arduino diesen Code immer wieder. Noch einmal können Sie eine elegantere Codierungslösung implementieren, die zu Ihrer Anwendung passt, insbesondere wenn Sie Eingänge hinzufügen, um Ihren Aktuator zu steuern.
Hinzufügen von Eingängen
Sobald Sie Ihren Aktuator mit einem Arduino steuern können, können Sie Eingaben für eine größere Automatisierung und Steuerung in den Arduino implementieren. Diese Eingänge können sein Schalter, eine breite Palette von Sensoren oder sogar Feedback vom Aktuator selbst. Da es eine breite Palette von Optionen für Eingaben gibt, variiert die Implementierung, aber es gibt einige allgemeine Punkte, die Sie kennen sollten. Wenn der Eingang eine binäre Eingabe wie einen Schalter liefert, möchten Sie die digitalen Stifte auf dem Arduino verwenden, die auf der Platine oder im Datenblatt gekennzeichnet sind, und verwenden die Funktion digitalread () in der Funktion Arduino ide. Wenn Ihr Eingabegerät ein analoges Signal liefert, müssen Sie die analogen Pins verwenden, die auf der Platine oder im Datenblatt gekennzeichnet sind und die Funktion analograd () verwenden.



