Linearantriebsgeschwindigkeitsregelung

Lineare Aktuatoren spielen eine entscheidende Rolle bei den Betriebsabläufen in verschiedenen Sektoren, einschließlich Gesundheitswesen, Fertigung, Landwirtschaft und Automobile unter anderem; Daher ist die Notwendigkeit einer größeren Präzision und Genauigkeit von wesentlicher Bedeutung. Lineare Aktuatordrehzahlregler bieten optimale Kontrollmechanismen an, um die Bewegung in den gewünschten Geschwindigkeiten gemäß den Anwendungsanforderungen zu regulieren.
Die Hauptfunktionen der linearen Stellantriebsgeschwindigkeitscontroller regulieren den Spannungseingang, der einem Elektromotor oder Stellantrieb geliefert wird, und erfüllen dennoch die Lastanforderungen bei maximaler Kraftausgangskapazität und gewährleisten damit eine größere Effizienz innerhalb dynamischer Systeme.
Die Steuerung der linearen Aktuatorgeschwindigkeiten erfordert ausgefeilte Mechanismen wie die Implementierung einer Geschwindigkeitsregelschleife, bei der Rückkopplungsschleifen von eingebetteten Sensoren erhalten werden, die Änderungen an Position oder Geschwindigkeit erkennen-dies hilft, optimale Ergebnisse durch Kalibrierung zu erzielen. FIRGELLIDas Aktuator Control Board verfügt über eine eigene Feedback-Schleife für integrierte Geschwindigkeitskontrolle, die optimale Bedingungen für den Betrieb festlegt und gleichzeitig genaue Bewegungen für Ihre Systementwicklungen sicherstellt.

FIRGELLI'S Actuator Control Board verfügt über eine eigene Feedback-Schleife für ein integrierte Geschwindigkeitskontrolle. Diese Steuerbox kann mit linearen Aktuatoren verwendet werden, die Feedback -Sensoren, SOCH als Hall -Sensro oder optischer Sensor eingebaut haben, da diese Sensoren die Geschwindigkeit des Akuators messen.
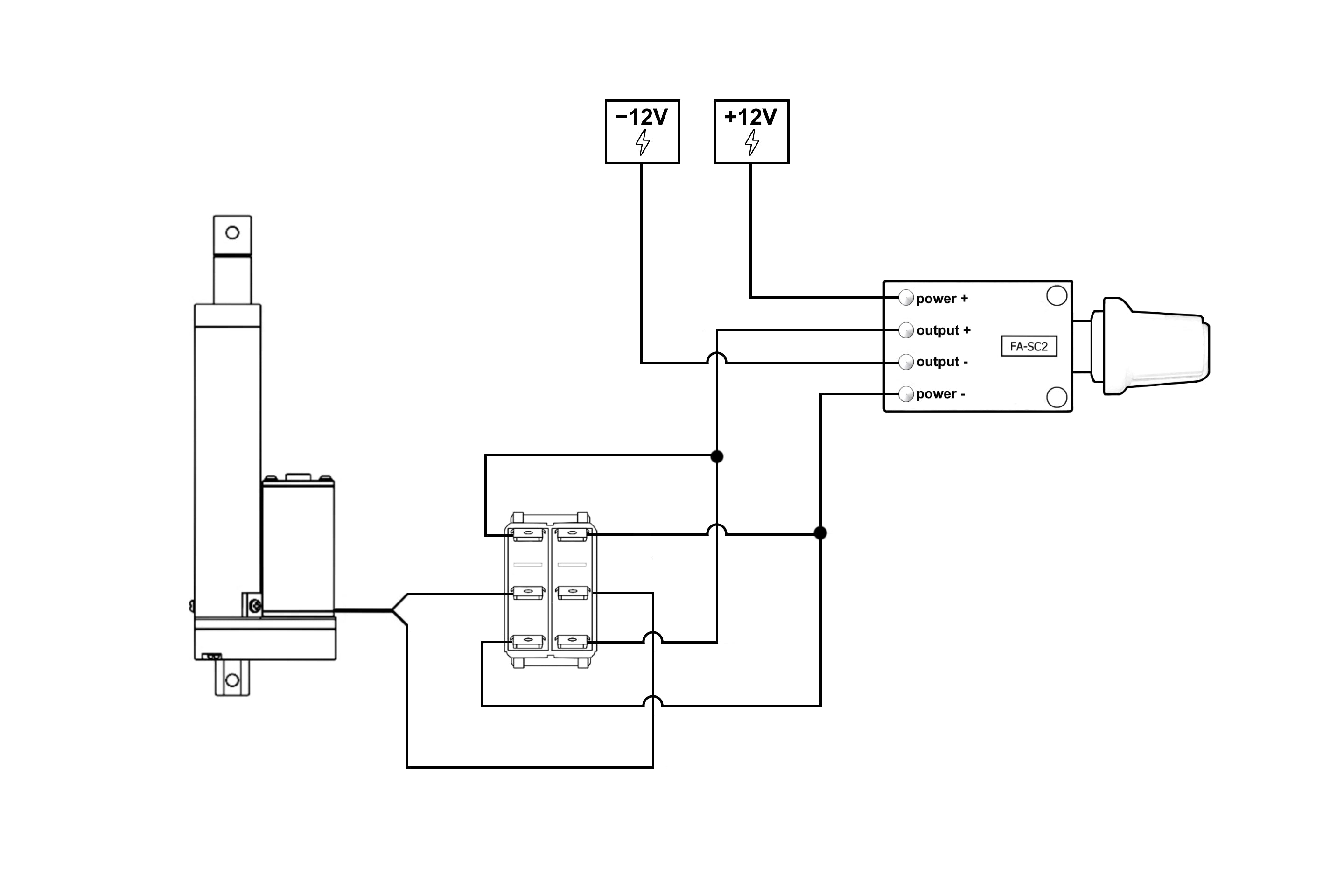
Um Präzision zu gewährleisten und Fehler zu vermeiden, überwachen und neu bewertende lineare Aktuatoren, die von Geschwindigkeitskontrollern bestimmt sind, ihre Geschwindigkeiten kontinuierlich. Das folgende Schaltplan zeigt, wie ein linearer Aktuator an einen Wippschalter und einen Geschwindigkeitscontroller angeschlossen wird, um eine optimale Leistung und Steuerung zu erhalten.
Schaltplan für einen Geschwindigkeitsregler und einen Aktuator
Futtermittelkontrolle
Im Zusammenhang mit linearen Aktuatoren und Geschwindigkeitskontrolle ist die Steuerung der Feed-Forward ein entscheidendes Konzept. Dieser Ansatz arbeitet unter der Annahme, dass der Benutzer als Controller die Ausgabe des Geschwindigkeitscontrollers genau vorhersagen und die erforderlichen Anpassungen entsprechend vornehmen kann. Der Hauptzweck einer Kontrollschleife für die Geschwindigkeitsregulierung besteht darin, die Geschwindigkeit des Aktuators zu optimieren, um sich mit den Anforderungen einer bestimmten Aufgabe anzupassen. Vorausgesetzt, dass alle Variablen konstant bleiben, ermöglicht es Benutzern, fundierte Vorhersagen über die Beziehung zwischen dem Dienstzyklus des Aktuators und seiner Geschwindigkeit auf der Grundlage der Sensorwerte pro Sekunde zu treffen.
Durch die Berechnung des Arbeitszyklus können Benutzer die gewünschte Geschwindigkeit genau erreichen und gleichzeitig Fehler in der Schätzung minimieren. Dieser Ansatz mildert das Risiko, das Ziel vollständig zu überschreiten und zu fehlen oder vorzeitig anzuhalten, bevor er das Ziel erreicht, und untergräbt das grundlegende Ziel, einen linearen Aktuator zu nutzen.
Wie ein DC -Geschwindigkeitsregler die Geschwindigkeit eines Stellantriebs steuert
Ein DC -Speed -Controller, der die Impulsbreitenmodulation (PWM) verwendet DC -Aktuator. PWM ist eine Technik, die die Kontrolle über die durchschnittliche Spannung ermöglicht, die einem Gleichstrommotor mit konstanter Frequenz schnell ein- und ausschaltet. Die Geschwindigkeit des DC -Aktuators kann moduliert werden, indem der pünktliche (Arbeitszyklus) relativ zur Ausgeschaltungszeit in jedem Zyklus angepasst wird.
Hier finden Sie einen Überblick darüber, wie ein DC -Speed -Controller, der PWM verwendet, die Geschwindigkeit eines DC -Aktuators steuert:
- Frequenz: Der PWM -Controller erzeugt ein konstantes Frequenz -Quadratwellensignal, das sich aus der Abwechslung an und aus Perioden wechseln. Diese Frequenz ist in der Regel hoch genug, dass der Motor des Aktuators die Schaltwirkung nicht wahrnimmt, was zu einer reibungslosen Geschwindigkeitsregelung führt.
- Auslastungsgrad: Der Auslastungsgrad Bezieht sich auf den Prozentsatz der Zeit, die das Signal während eines einzelnen Zyklus im State bleibt. Durch die Variation des Arbeitszyklus kann die durchschnittliche Spannung, die dem Motor des Aktuators geliefert wird, gesteuert werden. Ein höherer Arbeitszyklus entspricht einer höheren durchschnittlichen Spannung, was zu einer schnelleren Antriebsgeschwindigkeit führt, während ein niedrigerer Arbeitszyklus zu einer niedrigeren Durchschnittsspannung und folglich langsamere Aktuatorgeschwindigkeit führt.
- Modulation: Wenn der Benutzer oder ein automatisiertes System die gewünschte Geschwindigkeit des DC -Aktuators anpasst, ändert der PWM -Controller den Arbeitszyklus entsprechend. Dies stellt sicher, dass die entsprechende durchschnittliche Spannung dem Aktuator zugeführt wird, was eine präzise Kontrolle über seine Geschwindigkeit ermöglicht.
- Effizienz: Da der PWM -Speed -Controller schnell zwischen vollständig und vollständig aus den Zuständen wechselt, werden Energieverluste in Form von Wärme minimiert. Dies macht PWM zu einer hocheffizienten Methode zur Steuerung der Geschwindigkeit eines DC -Aktuators.
Zusammenfassend lässt sich sagen, dass ein DC -Speed -Controller, der PWM verwendet, durch Erzeugen eines Quadratwellensignals mit konstanter Frequenz und unterschiedlichem Arbeitszyklus erzeugt wird. Durch die Einstellung des Arbeitszyklus moduliert der Controller die durchschnittliche Spannung, die dem Motor des DC -Aktuators geliefert wird, und ermöglicht eine präzise Kontrolle über die Geschwindigkeit und die hohe Energieeffizienz.
Warum sollten Sie einen Geschwindigkeitscontroller verwenden?
-
Präzisionskontrolle: Der Hauptvorteil eines Geschwindigkeitsreglers ist die Fähigkeit, eine präzise Kontrolle über die Geschwindigkeit des Aktuators zu liefern. Mit dieser Funktion können Menschen die Geschwindigkeit des Aktuators fein abstellen und sicherstellen, dass er für die jeweilige Aufgabe oder Anwendung optimal funktioniert. Durch die Erreichung der gewünschten Geschwindigkeit mit Genauigkeit können Sie die Gesamtleistung und Effektivität des Systems verbessern.
-
Anpassungsfähigkeit: Unterschiedliche Anwendungen erfordern häufig unterschiedliche Geschwindigkeitsanforderungen oder erfordern Anpassungen während des Betriebs. Der FIRGELLI Speed Controller bietet Ihnen die Flexibilität, die Geschwindigkeit des Aktuators einfach zu ändern und anzupassen, um die einzigartigen Anforderungen jeder Anwendung zu erfüllen. Diese Anpassungsfähigkeit ermöglicht Ingenieure, die Systemleistung in verschiedenen Szenarien zu optimieren.
-
Reibungslosen Betrieb: Geschwindigkeitscontroller, insbesondere solche, die die PWM -Technologie (Pulse Width Modulation) verwenden, die am besten gedreht werden, bieten den Vorteil, eine reibungslose und konsistente Kontrolle über die Geschwindigkeit des Aktuators zu gewährleisten. Dieser reibungslose Betrieb ist entscheidend, da er mechanische Spannung und Verschleiß am Aktuator minimiert und damit seine Lebensdauer erweitert.
-
Synchronisation: Bestimmte Anwendungen benötigen eine synchronisierte Bewegung zwischen mehreren Aktuatoren. In solchen Fällen spielen Geschwindigkeitscontroller eine entscheidende Rolle bei der Aufrechterhaltung einer konsistenten Geschwindigkeit in allen beteiligten Aktuatoren. Diese Synchronisation sorgt für eine präzise Koordination und einen harmonischen Betrieb, was zu einer optimierten Leistung und Funktionalität des gesamten Systems führt.
Was ist der hohe Ton -Sound, den Sie vom Speed Controller kommen hören, wenn Sie die Geschwindigkeit niedriger und niedriger drehen?
Der hohe Geräusch, den Sie vom Geschwindigkeitsregler stammen hören, wenn Sie die Geschwindigkeit niedriger und niedriger drehen, wird normalerweise durch die Schaltfrequenz der PWM-Technik (Pulswidth-Modulation) verursacht, mit der die Geschwindigkeit des Stellantriebs reguliert wird.
Bei PWM werden die Stromversorgung des Motors bei konstanter Frequenz schnell ein- und ausgeschaltet. Wenn die Geschwindigkeit verringert wird, nimmt der Arbeitszyklus (der Prozentsatz der Zeit, das das Signal im Zustand liegt) ab, wodurch der Motor eine weniger durchschnittliche Spannung erhält. In einigen Fällen können die PWM -Frequenz oder ihre Harmonischen in den hörbaren Bereich des menschlichen Gehörs (20 Hz bis 20 kHz) fallen.
Der Schall kann aufgrund der Schwingung der Motorspulen oder anderer Komponenten innerhalb des Geschwindigkeitsreglers erzeugt werden, die bei der PWM -Frequenz oder seiner Harmonischen mitschwingen. Diese Schwingung wird durch die schnelle Ausdehnung und Kontraktion des Magnetfelds verursacht, das durch den elektrischen Strom in den Motorspulen erzeugt wird, wenn sie zwischen den Zuständen wechseln.
Wenn die Geschwindigkeit niedriger wird, nimmt der Arbeitszyklus ab und der Motor erhält bei jedem Schaltzyklus weniger Leistung. Diese Leistungsänderung kann dazu führen, dass das hörbare Rauschen stärker wird. Darüber hinaus können bestimmte Resonanzfrequenzen des Systems je nach mechanischer und elektrischer Eigenschaften des Motor- und Geschwindigkeitsreglers anfälliger für hörbares Rauschen sein.




