Die Verwendung von Feedback, um genaue Bewegungen zu gewährleisten, ist der Schlüssel für jedes Automatisierungsprojekt von Roboter bis TV -Liften. Die ordnungsgemäße Implementierung von Feedback ermöglicht eine genaue Steuerung der geschlossenen Schleife für Ihre Linearantrieb; Sie müssen nicht mehr manuell überprüfen, ob Ihr linearer Aktuator in die richtige Position geht. Da lineare Aktuatoren normalerweise verwendet werden, um ein Objekt von einer Position in eine andere zu verschieben, ist das wichtigste Feedback, das Sie von Ihrem Aktuator erhalten, seine Position. Lineare Aktuatoren mit positionellem Feedback messen typischerweise die Position unter Verwendung eines der 3 verschiedenen Sensoren. Potentiometer, Hall -Effekt -Sensoren und optische Sensoren.
Potentiometer
Potentiometer sind variable Widerstände, die bei linearer Aktuatoren sich basierend auf der Position des Aktuators ändert. Potentiometer bestehen aus den 3 Stiften, wie unten gezeigt, Pin 1 die Eingangsspannung, Pin 3 ist gemahlen und Pin 2 ist der einstellbare Widerstand. Sie können die Ausgabe der Potentiometer durch Messen der Spannung zwischen Pin 2 und Masse lesen, was sich beim Bewegungsantrieb ändert. Effektiv Implementieren Sie dieses FeedbackSie müssen eine Art von Controller wie eine verwenden Arduino, um diesen Positionswert zu lesen, während sich der Aktuator bewegt.

Eine der größten Stärken eines Potentiometers ist, dass es einen Hinweis auf eine absolute Position des linearen Aktuators liefert. Aus diesem Grund kann dieses Feedback in der Software eines Controllers recht einfach zu verarbeiten sein, da Sie einfach den aktuellen Ausgangsleswert mit dem Ausgangswert Ihrer gewünschten Position vergleichen können. Sie müssen sich auch nie darum kümmern, die Position Ihres Stellantriebs zu verlieren, wenn Sie Ihr System ausschalten, da der Widerstand des Potentiometers unabhängig davon, unabhängig davon, dass sie angetrieben werden oder nicht.

Es gibt nur wenige Nachteile der Verwendung von Potentiometern für positionelles Feedback. Ein Nachteil ist, dass das Feedback aus dem Potentiometer durch elektrische Rauschen beeinträchtigt werden kann und möglicherweise das Signal filtern, um stabile Ergebnisse zu erzielen. Der Ausgang des Potentiometers hängt auch von der Eingangsspannung zum Potentiometer ab, was es schwierig macht, sicherzustellen, dass sich mehrere lineare Aktuatoren gleichzeitig bewegen, da sich das Ausgangssignal aufgrund geringfügiger Änderungen der Eingangsspannung geringfügig variieren kann. Außerdem sind Potentiometer im Allgemeinen nicht so empfindlich gegenüber kleineren Bewegungen des linearen Aktuators im Vergleich zu den anderen Rückkopplungsoptionen, was wiederholbare Ergebnisse erschwert.
Hall-Effekt-Sensor
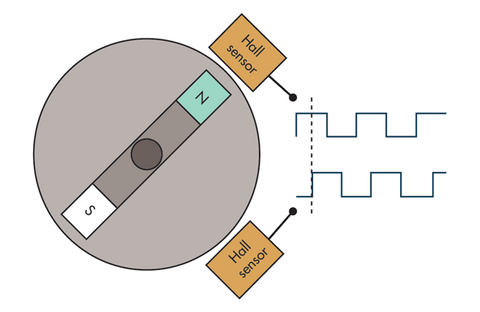
Hall -Effekt -Sensoren Arbeiten basierend auf dem Hall -Effekt, der die Wirkung eines Magnetfeldes auf eine Spannung darstellt. Hall -Effect -Sensoren können entweder eine digitale oder lineare Ausgabe liefern, aber für lineare Aktuatoren verwenden sie in der Regel digitale Ausgangshalle -Effektsensoren. Wenn diese Sensoren ein Magnetfeld erkennen, erzeugen sie eine Spannung, die von einem Controller gelesen werden kann [1]. Bei linearen Aktuatoren befinden sich diese Sensoren im Getriebe des Aktuators zusammen mit einer Magnetscheibe. Wenn sich der lineare Aktuator bewegt, dreht sich diese Magnetscheibe den Hall -Effekt -Sensor, der einen Spannungsimpuls erzeugt. Diese Impulse können verwendet werden, um zu bestimmen Wie weit hat sich der Aktuator bewegt. Im Allgemeinen geben lineare Aktuatoren, die Hall -Effekt -Sensoren verwenden, um positionelles Feedback bereitzustellen, den Impuls pro Zoll, den Sie verwenden können, um festzustellen, wie weit sich der Aktuator bewegt. Wenn Sie beispielsweise 6000 Impulse entdeckt haben und Ihr Aktuator einen Puls pro Zoll von 12000 hat, bedeutet dies, dass Ihr Stellantrieb 0,5 Zoll bewegt hat.
Der Hauptnachteil der Verwendung eines Hall -Effekt -Sensors für positionelle Rückkopplungen im Vergleich zu einem Potentiometer besteht darin, dass Hall -Effekt -Sensoren keine absolute Position messen. Stattdessen produzieren sie Impulse, die gezählt werden können, um festzustellen, wie weit sich der Aktuator bewegt hat, sodass Sie wissen müssen, wo der Stellantrieb die absolute Position ermittelt. Dies kann in der Software Ihres Controllers, wie in einem Arduino, überwunden werden, indem die aktuelle Position des Aktuators gespeichert und den Aktuator immer von einer bekannten Position startet, wie vollständig zurückgezogen. Auf diese Weise müssen Sie den Aktuator dieser bekannten Position jedes Mal, wenn Sie Ihr System einschalten, nach Hause nehmen.
Die Stärke der Verwendung eines Hall -Effekt -Sensors für positionelles Feedback besteht darin, dass es im Vergleich zu dem Feedback eines Potentiometers eine viel größere Auflösung bietet. Da es 1000 Impulse pro Zoll Bewegung geben kann, bieten Hall -Effect -Sensoren eine Präzision und Zuverlässigkeit bei der Positionierung Ihres linearen Aktuators. Die Impulse variieren auch in der Frequenz, basierend auf der Geschwindigkeit Ihres linearen Aktuators, dh Sie können sie verwenden, um die Geschwindigkeit Ihres linearen Aktuators zu messen. Hall -Effekt -Sensoren bieten auch eine größere Fähigkeit, sicherzustellen, dass sich mehrere lineare Aktuatoren gleichzeitig zusammenziehen, da die Impulszahlen genauer sind als die sich ändernde Spannung des Potentiometers. Nutze unseres FA-Sync-X Actuator ControllerSie können sogar sicherstellen, dass sich die Aktuatoren unabgeformt unabhängig von der Last bewegen.
Optischer Sensor
Optische Sensoren die in linearen Aktuatoren verwendet werden (es gibt andere Art von optischen Sensoren), die den Hall -Effekt -Sensoren sehr ähnlich sind, außer dass sie Licht mit einem Fotodetektor erkennen [2]. Optische Sensoren arbeiten, indem sie Licht aus einer LED oder einer anderen Lichtquelle durch eine Encoder -Festplatte übertragen werden. Diese Encoder -Festplatte wird geschleift, damit das Licht regelmäßig durchlaufen kann. Auf der anderen Seite der Scheibe befindet sich der Fotodetektor, der das Licht erkennt, wenn es durch die Schlitze in der Scheibe verläuft und ein Ausgangssignal erstellt [3]. Während sich der Aktuator bewegt, dreht sich die Encoder -Scheibe und das Licht wird vom Fotodetektor nachgewiesen, der einen Spannungsimpuls erzeugt. Diese Impulse können ähnlich wie die Impulse eines Hall -Effekt -Sensors verwendet werden, um zu bestimmen Wie weit hat sich der Aktuator bewegt. Lineare Aktuatoren, die optische Sensoren für das positionale Feedback verwenden, geben auch den Impuls pro Zoll an, den Sie verwenden können, um festzustellen, wie weit sich der Aktuator bewegt.

Optische Sensoren haben wiederum ähnliche Stärken und Nachteile wie Hall -Effekt -Sensoren im Vergleich zu Potentiometern. Sie haben eine größere Genauigkeit und Auflösung, sogar größer als Hall -Effekt -Sensoren, und können verwendet werden, um die Geschwindigkeit des linearen Aktuators zu messen. Sie können auch besser sicherstellen FA-Sync-X Actuator Controller. Sie messen auch keine absolute Position und erfordern stattdessen, dass Sie den Puls zählen, um festzustellen, wie weit Ihr Stellantrieb bewegt ist. Sie müssen auch in einer bekannten Position beginnen, da Sie die aktuelle Position in der Software speichern müssen, um die absolute Position zu verfolgen.
Zusammenfassung
Ihre Wahl für die Art von Feedback, die Sie von Ihrem gewünscht haben Linearantrieb Hängt davon ab, was Sie für wichtiger halten. Benötigen Sie ein hohes Maß an Genauigkeit? Wählen Sie einen linearen Aktuator mit optischer oder Hall -Effekt -Sensor. Möchten Sie Ihren Aktuator nicht jedes Mal, wenn Sie ihn einschalten, in eine Heimposition einstellen? Dann gehen Sie mit einem linearen Aktuator mit einem Potentiometer. Möchten Sie mehrere lineare Aktuatoren gleichzeitig steuern? Wählen Sie einen linearen Aktuator mit optischer oder Hall -Effekt -Sensor. Möchten Sie, dass Ihr Feedback eine absolute Position bietet? Gehen Sie mit einem linearen Aktuator mit einem Potentiometer.
[1] Monari, G. (Juni 2013) Verständnis der Lösung in optischen und magnetischen Encodern. Abgerufen von: https://www.electronicdesign.com/technologies/components/article/21798142/understanding-resolution-in-optical-and-magnetic-encoders
[2] Paschotta, R. Artikel über optische Sensoren. Abgerufen von:https://www.rp-photonics.com/optical_sensors.html



