FA-SYNC-X Synchronous Control Board
The Firgelli Automation FA-SYNC-2 and FA-SYNC-4 Synchronous Control Board allows you to control up to 2 and 4 linear actuators, respectively, and ensure they move in step and at the same speed irrespective of load. This will also protect your design as unsynchronized motion could lead to bending and damage of either the load or the actuators. This is important in applications where more than one actuator is used to move the same load as with trapdoors, RV roof lifts, and tonneau covers. These boards require linear actuators that have internal feedback and all linear actuators must be of the same type with the same stroke length and force. Using different linear actuators will not work and the board will be unable to ensure synchronous movement. For a list of compatible and not compatible linear actuators, check out the FA-SYNC-X product page.
Why Utilize FA-SYNC-X Board with an Arduino?
Utilizing both an Arduino and a FA-SYNC-X board will allow you to gain the benefits of both boards. With the Arduino, you’ll be able to implement much greater automation compare to using a switch with the FA-SYNC-X board. While you can develop your own synchronous controller with an Arduino, utilizing the FA-SYNC-X board will drastically reduce the complexity of the Arduino’s code and will ensure your linear actuators move simultaneously. Utilizing these boards together is ideal for applications where you require multiple linear actuators to move based on input from a sensor or based on an internal timer, like positioning solar panels to achieve maximum sunlight.

Set Up & Calibration
Setting up the FA-SYNC-X boards to be controlled by an Arduino is done in a similar fashion as in other applications and you should follow the user manual for these boards to do so properly. Connecting the linear actuators to the FA-SYNC-X boards is still done using either the 2 or 4 6-pin terminal blocks and connect the power, ground, sensor power, sensor ground, sensor output 1, and sensor output 2 wires of the linear actuator to the corresponding terminal in the terminal block. You will also power the FA-SYNC-X board similarly by connecting the supply voltage, either 12V or 24V, to the power in 2-pin terminal block, which is to the left of the 6-pin terminal blocks. You must ensure that you connect the positive and negative leads of the power supply to the proper input terminal because if they are flipped it will cause permanent damage to the FA-SYNC-X board. To calibrate your FA-SYNC-X board, you will still follow the same procedure as described in the user manual of these boards.

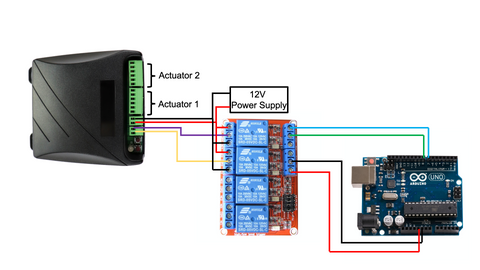
Once the FA-SYNC-X board is connected and calibrated, you can interface it with the Arduino board. You will still control the FA-SYNC-X board using the control terminal block, the left most 2-pin terminal block, but instead of using a switch or remote control to control the direction of the linear actuators, you will use an Arduino. One problem is that the Arduino will not supply an input voltage high enough to control the internal relays of the FA-SYNC-X board, but we can use external relays to overcome this problem. Like when controlling a linear actuator with an Arduino, we can make use of 2 SPDT relays to control the FA-SYNC-X board. We will need to connect the COM pin of each relay to one of the pins of the control terminal block and connect the normally open (NO) pin of each relay to the positive of the power supply and normally close (NC) pin of each relay to the negative of the supply. You will control both of these external relays with the digital pins of the Arduino, like seen below. In this case, you also need to power the relay board using the Arduino as well.
Controlling the FA-SYNC-X Board with an Arduino
Once Arduino and the FA-SYNC-X board is connected and the FA-SYNC-X board is connected and calibrated to your linear actuators, you’ll be able to control them utilizing inputs to the Arduino. While code for the Arduino to read inputs from sensors will vary based on the sensors you use in your application, the code to control the FA-SYNC-X board will be similar. The code to control the FA-SYNC-X board will be very similar to the code used to control a linear actuator with an Arduino. To extend the linear actuators, you will need to connect pin A on the control terminal block of the FA-SYNC-X board to a positive voltage, while connecting pin B to ground. To do this with the Arduino, you simply need to energize the lower relay by connecting the input for that relay to ground (as the relay board used above is active-low) and it will connect pin A to a positive voltage. Pin B will already be connected to ground as each relay is connected to ground when not energized as per our setup. To retract the linear actuators, you will follow the same steps but for pin B. You will energize the top relay that will connect pin B to a positive voltage by connecting the control pin of that relay to ground. To stop the linear actuators, you simply de-energize all coils and pin A and B will be connected to ground. The code sample below shows the code use to extend, retract, and stop the linear actuators as described above. The code doesn’t show how to implement input sensors or timers used to control when to stop and move the linear actuators as it will vary based on sensors used and application.
| /* Firgelli Automations | |
| * Limited or no support: we do not have the resources for Arduino code support | |
| * | |
| * Program demos how to Control a FA-SYNC-X Board with An Arduino | |
| */ | |
| static int A = 8; // Pin 8 controls second relay that is connected to Pin A of the FA-SYNC | |
| static int B = 7; // Pin 7 controls top relay that is connected to Pin A of the FA-SYNC | |
| void setup() { | |
| pinMode(A, OUTPUT); // Set A as output | |
| pinMode(B, OUTPUT); // Set B as output | |
| digitalWrite(A, HIGH); // Initialize pin A as HIGH as Relays are Active-LOW | |
| digitalWrite(B, HIGH); // Initialize pin B as HIGH as Relays are Active-LOW | |
| } | |
| void loop() { | |
| // Extend Linear Actuator | |
| digitalWrite(A, LOW); // Energizes Second to Connect Pin A to Positive Voltage | |
| digitalWrite(B, HIGH); | |
| delay(3000); // Wait 3 Seconds | |
| // Stops Actuator | |
| digitalWrite(A, HIGH); | |
| digitalWrite(B, HIGH); | |
| delay(3000); // Wait 3 Seconds | |
| // Retract Linear Actuator | |
| digitalWrite(A, HIGH); | |
| digitalWrite(B, LOW); // Energizes Top to Connect Pin B to Positive Voltage | |
| delay(3000); // Wait 3 Seconds | |
| // Stops Actuator | |
| digitalWrite(A, HIGH); | |
| digitalWrite(B, HIGH); | |
| } |
Downsides
The biggest drawback of utilizing a FA-SYNC-X board with an Arduino is that the Arduino itself will not know the exact position of the linear actuator. As the feedback that is sent into the FA-SYNC-X board is not shared with the Arduino, it has no way for knowing exactly where the actuator is. This can limit the level of automation and control you have over your linear actuators as you won’t be able to position them based on feedback, although this isn’t an issue if you are only fully extending and retracting the linear actuator. The simplest solution to overcome this is to estimate how far your actuator moves per millisecond and use the millis() internal timer of the Arduino to estimate the position based on the total time the actuator is running, although this won’t give you precise positioning. If you do require precise position, you could overcome this issue by adding an external feedback element to your design, like an external linear potentiometer, to provide feedback to the Arduino.

Summary
While there are some drawbacks to using FA-SYNC-X board with an Arduino, they might not be an issue in your design. Using these boards together, you will be able to ensure simultaneous movement of multiple linear actuators irrespective of load with a greater level of automation. Using these boards in conjunction with each other is ideal for applications that require you to use multiple linear actuators to move a single load and you want to automate the move based on timer or sensor input.



