Mastering Gear Ratios: Unveiling the Heart of Gear Motors
Gear ratios are the unsung heroes behind the remarkable performance of gear motors. These ratios govern the relationship between the rotations of the input shaft and the output shaft, determining the trade-offs between speed and torque. In this article, we'll delve deeper into the world of gear ratios in gear motors, exploring different types of gearboxes, calculation methods, benefits, drawbacks, and the intricate dance between gear ratios and gear types. By demystifying this crucial aspect, we aim to equip you with a comprehensive understanding that bridges the gap between theory and practical application.
Types of Gearboxes in Gear Motors
Gearboxes come in various configurations, each tailored to specific applications and performance requirements. Two of the most common types found in gear motors are spur gears and planetary gears.
- Spur Gears: These gears have straight teeth and are mounted on parallel shafts. They are simple and cost-effective, making them suitable for applications where precision isn't a primary concern. However, they can be noisy and less efficient due to high friction and limited load distribution.
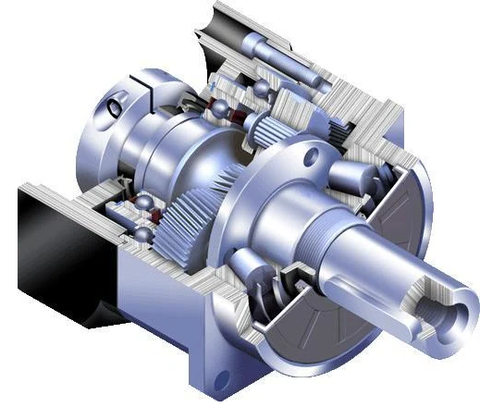
- Planetary Gears: Often referred to as epicyclic gears, these consist of a central sun gear, planet gears, and a ring gear. Planetary gear systems offer exceptional torque output, high efficiency, and compact size. They distribute load across multiple teeth, minimizing wear and noise. This makes them a top choice for gear motors demanding precision and efficiency.
Calculating Gear Ratios
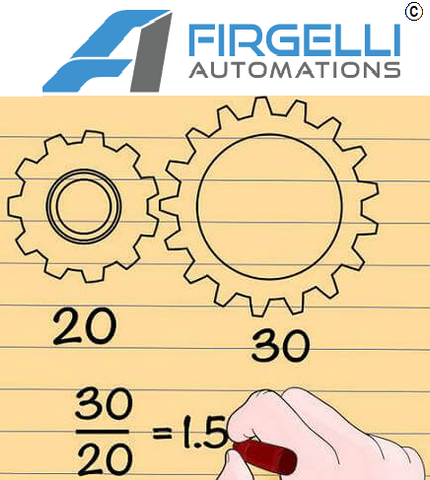
Gear ratios are expressed as a fraction or a ratio, indicating how many times the input gear must rotate to achieve one full rotation of the output gear. For instance, a gear ratio of 10:1 signifies that the output gear completes one revolution when the input gear makes 10 revolutions. The image below illustrates how the calculation is done.
Benefits and Drawbacks
Different gear ratios offer distinct advantages and trade-offs:
- High Gear Ratio (e.g., 100:1): Provides high torque output and low-speed rotation. Ideal for applications requiring heavy lifting and precise control, such as robotics and conveyors. However, the trade-off is reduced speed.
- Low Gear Ratio (e.g., 5:1): Yields higher speed but sacrifices torque. Used in applications where quick motion is essential, such as certain automation tasks. However, it may struggle with heavy loads.
Gear Ratios and Gear Types: The Delicate Balance
The choice of gear ratio is closely intertwined with the type of gears used. For instance:
- In planetary gears, varying the arrangement of sun gears, planet gears, and ring gears can lead to different gear ratios and performance characteristics.
- Helical gears, which have angled teeth, reduce noise and improve load distribution but may have slightly lower efficiency than spur gears.
- Bevel gears are used to change the direction of rotation, often seen in applications where the input and output shafts are not aligned.
Considering Trade-offs
While high gear ratios offer immense torque, they also lead to slower output speeds, which may not suit applications requiring swift movement. Low gear ratios provide high-speed output but compromise on torque. Striking the right balance depends on the specific needs of your application.
Conclusion
Understanding gear ratios in gear motors unlocks the gateway to tailoring performance to precise requirements. Whether you're aiming for Herculean torque, lightning-fast motion, or a balance of both, gear ratios are the key. The choice between spur gears and planetary gears, the calculation of gear ratios, and the delicate dance between speed and torque allow engineers and enthusiasts to fine-tune the heart of mechanical systems. By mastering the art of gear ratios, you're poised to revolutionize industries, from robotics and automotive to industrial automation and beyond.
Check out our Gear Motors here
Click here


