A new automation project can be daunting; we know. With all the technical terms, electrical wiring, computer control interfaces and the other bells and whistles, it can be hard to know where to even start! When uncertainty is keeping your project from progressing, getting back to basics and reviewing your project's requirements can show you a route forward. I like to say that knowledge is power, but understanding is currency.
When starting a new automation project, or refitting and replacing a linear actuator into an existing project, these questions will help you determine which actuator(s) will work for your project.
- What is the application?
- Are you putting an actuator into an existing design or product?
- Are you designing a new project from scratch?
- What is the Load on the unit, or, how much force do you need?*
- Actuator weight ratings are for axial loads only. For non-linear applications (like hinges), you may need to calculate the axial load.
- How much stroke ('travel') do you need?
- Required speed of motion?
- Actuator movement speed and force rating are inversely related. You may need to choose between the speed you want or the force you want, depending on application.
- How often do you need it to operate?
- We calculate duty cycles at 5 minutes of continuous use (in motion); most non-industrial applications do not need to consider duty cycles.
- Other Conditions?
- Features like collision-protection, mitigated speeds or variable speed control can be included with additional components.
- Other functions can sometimes be accomplished with relays, control schemes, and creative wiring.
Once all of the above criteria is understood, you’re ready to construct your system from components. A basic actuator system requires these parts:
- Actuator(s) & Mounting Brackets - Brackets are actuator-specific. Refer to product pages for proper brackets
- Controls (Switch or Remote or PLC)
- The Control portion of the system is responsible for switching the polarity of the motor circuit, which controls the direction of actuator motion.
- Most restrictions, conditions, and requirements for an automated system are involved in the control scheme.
- Interfacing with external systems can be done with control components at varying levels of complication.
- Power Source - (Exceed the Cumulative Amperage Draw of your actuators)
- The easiest system possible is the CSPS Wired Power & Control System, plus one actuator (with a 5A draw).

Next, it’s time to determine your most important requirements. We find most projects fit into one of the following categories: Vertical Lifting/Lowering, Horizontal Sliding Motion, Hinged Actuations, or a precision-based project (Example, above, a Stewart Platform, or scientific testing equipment). We will not address precision in this article; if you are designing a precision application, we recommend starting with our Arduino-controlled Actuator Tutorials
Vertical Lifting and Horizontal Slide applications are the simplest to plan - everything is parallel, so there’s no extra calculations to get your stroke and weight ratings - just simple addition and subtraction.
Vertical Lifts
One of the most straight-forward applications is a Kitchen Appliance Lift or Drop Down Lift - these projects are common enough that we made a nearly all-in-one actuator kit for it! The Kitchen Appliance Lifts are only capable of moving in a vertical line, with substantial support from the telescopic steel frame.
One of the most widely used vertical lifting applications for our actuators is the Camper Van Bed Lift. This operation is a direct vertical motion, usually spread across 2-4 actuators, and with a requirement for even, synchronized motion.
Both of the above projects use the same principle, as does the example below. The actuator is moving something into or out of the way, in a straight, simple, vertical motion. The only functional differences between the projects are the actuator position relative to the moving object - most Bed Lifts have actuators underneath the object; most Kitchen Appliance Lifts will be underneath and behind, and others may even be above or adjacent to the moving object. In some particular applications, a pulley can be used. As long as neither the actuator nor the moving object is obstructed, and the mounted connections are solid, the operation will work.
For this example, we’ll pretend we have a 20” Pass-through window that must be pulled up and out of the way for use. The window is 25 pounds, including the frame. The window is on tracks. We need to have more than 25 pounds of push/pull, and at least a 20” stroke actuator(s).

The actuator(s) in this operation can be mounted vertically in either orientation. In the photo above, one unit has the rod up and one down. The Red dots represent the brackets or attachments required for motion. This operation could use two synchronized actuators, mounted parallel, to ensure and even motion of the window. This operation could also be done by a single actuator, above the window, pulling from the center - the window would need to be balanced well enough to not bind during operation. If this is a concern, we recommend using a Rail Slide, Drawer Slide, or other linear guide to ensure a non-binding motion.
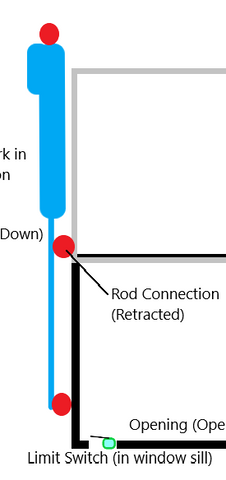
Next, the actual motion. This window is 20” tall. Using a Premium Linear Actuator for this example; at time of writing, we have an 18” stroke option, and a 24” stroke option - which should we choose? The stroke of the actuator is the maximum amount of motion you can get from the unit. You can always restrict the motion further with External Limit Switches. For our 20” example, an 18” actuator would leave 2” of the window inside the opening. A 24” unit, while longer, can be limited to the 20” we require, without too much extra consideration. We do not want the actuators to dead-drive after the window is closed, as this could hurt the window, someone’s fingers, the actuator, or all of the above. We would recommend using an External Limit Switch to stop the operation when the desired motion is complete. Click Here for more information about installing and wiring External Limit Switches.
In the example project, we should use an External Limit Switch to stop the actuator on the closed or lowered position. For this, we would line up the Retracted (Up) position of the window with the fully retracted position of the actuator; This uses the retraction-side internal limit switch of the actuator to restrict motion upwards, and the External Limit Switch will stop the extension (lowering) as soon as the window makes contact with the sill.
We should take the horizontal dimension of the window into account for wiring, but it will have no effect on the operation.
Horizontal Slides
A Horizontal, Sliding Operation can be calculated much the same way as a vertical operation, but the load requirements will change. Common Horizontal Operations include slide-out drawers or stairs, side-moving hidden TVs, or extending platforms (such as deployable solar panels).

When automating a horizontal motion, the first step is to create the motion to be automated. Most projects use a Drawer Slide or Rail Slide for this. In this application, the slide is actually bearing the load weight, so choosing the Right Linear Guide or Slide is paramount. You will want to install the linear slide components first and ensure the motion works by pushing the application with your hand (if possible).

We have already established that the actuator in this application does not push the full weight of the object. Instead, the actuator only needs to overcome the friction on the linear guides - depending on what you’ve used, this value could be very low. If you cannot get an approximate force-estimate from moving the object yourself, you could calculate the cumulative friction/torque of your slides based on the moving object’s weight, then make sure the actuator exceeds that value. The last option is to select an actuator that could vertically lift the object, which guarantees that it will move the object through a horizontal sliding motion.
Hinged Flaps or Lids
Our third common project type is a hinged application. We actually have a calculator to help with this - however this article will not address how to use the Linear Actuator Calculator. (Click here for LAC tutorial article).

A hinged application requires some trigonometry and simple physics calculations, if done from scratch. As always, the first step is to define the motion and ensure the moving object can effectively articulate around the hinge.

The ideal application allows the actuator to push the moving object along it’s path of motion. This object’s path of motion is an arc, rather than a straight line - this means that the actuator’s angle of attack will change during the operation - which, in turn, means that the momentary required force will change through the operation as well. In these situations, the actuator’s angle relative to the moving object (lid or flap) is very important. The mounting positions will affect this angle, as well as the force; you may have realized that this application has 3 variables that all change and affect the value of the others. These variables are the Actuator Stroke Length, Object-Mounting Position relative to the Hinge joint, and the required actuator force. It’s recommended to focus on the distances and stroke first, then calculate the weight requirement for that respective position.

When the flap/object is ‘closed’ and the actuator is retracted, the mounting points should be the Hole-to-hole Length of the Retracted Actuator apart, and when the flap/object is ‘opened’, these mounting points should be the extended actuator length apart - A stroke that is too long may be limited to the correct length, but a stroke that is too short will not move the object fully. The calculator mentioned previously is designed to help with these estimations. Click here for that tutorial.

If the Mounting Points are closer to the hinge, the operation will require a higher force, shorter-stroke actuator. If your mounting points are further from the hinge, you will be able to use a lower force actuator with a longer stroke length. For hinged projects, there is almost always a range of functional actuator possibilities, and it is up to you to determine which one of the options will fit your project best.
You may have realized that we are defining two points on a plane that make a triangle when deployed - this is the trigonometry that can be used to calculate stroke length from scratch. This reasoning may also define two possible mounting points, in this situation, either location will work, but they will always have different load values. An example of what this looks like is below.
Mounting Position 1: This operation will have a lower load weight, as the mounting positions are closer to perpendicular when the object is in the horizontal position, which is when there is the most load on the actuator. The Mechanical Advantage is higher with this design.

Mounting Position 2: This layout will require a higher force actuator; this is because the actuator is angled towards the hinge. This necessitates more force required to start moving the object.




