Die gebruik van terugvoer om te verseker dat presiese bewegings die sleutel is in enige outomatiseringsprojek van robot na TV -hysbakke. Die korrekte implementering van terugvoering maak voorsiening vir akkurate geslote lusbeheer van u Lineêre aktuator; U hoef nie meer met die hand te kyk of u lineêre aktuator na die regte posisie gaan nie. Aangesien lineêre aktuators tipies gebruik word om 'n voorwerp van een posisie na 'n ander te skuif, is die posisie die belangrikste terugvoering van u aktuator. Lineêre aktueerders wat posisionele terugvoer het, sal tipies posisie meet met behulp van een van die 3 verskillende sensors; Potensiometers, Hall Effect -sensors en optiese sensors.
Potensiometers
Potensiometers is veranderlike weerstande wat hul weerstandsveranderings op grond van die aktuator van die aktuator, wanneer dit in lineêre aktuators gebruik word, gebruik word. Potensiometers sal bestaan uit die 3 penne soos hieronder getoon, pen 1 is die insetspanning, pen 3 is gemaal, en pen 2 is die verstelbare weerstand. U kan die uitset van die potensiometers lees deur die spanning tussen pen 2 en grond te meet, wat sal verander namate die aktuator beweeg. Om effektief te wees Implementeer hierdie terugvoer, moet u gebruik maak van 'n soort beheerder, soos 'n Arduino, om hierdie posisionele waarde te lees soos die aktuator beweeg.

Een van die grootste sterk punte van 'n potensiometer is dat dit 'n aanduiding is van die absolute posisie van die lineêre aktuator. As gevolg hiervan, kan hierdie terugvoer redelik maklik wees om in die sagteware van 'n beheerder te hanteer, aangesien u die huidige uitvoerlesing eenvoudig kan vergelyk met die uitsetlesing van u gewenste posisie. U hoef ook nooit bekommerd te wees oor die verlies van u aktuator se posisie as u u stelsel afskakel nie, aangesien die weerstand van die potensiometer dieselfde sal wees, ongeag of dit aangedryf word of nie.

Daar is min nadele van die gebruik van potensiometers vir posisionele terugvoer. Een nadeel is dat die terugvoer van die potensiometer deur elektriese geraas beïnvloed kan word en dat u van u moet filter om die sein te filter om stabiele resultate te behaal. Die uitset van die potensiometer is ook afhanklik van die insetspanning na die potensiometer, wat dit moeilik kan maak om te verseker dat veelvuldige lineêre aktuators gelyktydig beweeg, aangesien die uitsetsein effens kan wissel as gevolg van geringe veranderinge aan die insetspanning. Potensiometers sal ook gewoonlik nie so sensitief wees vir kleiner bewegings van die lineêre aktuator nie, in vergelyking met die ander terugvoeropsies, wat herhaalbare resultate moeiliker maak.
Hall Effect Sensor
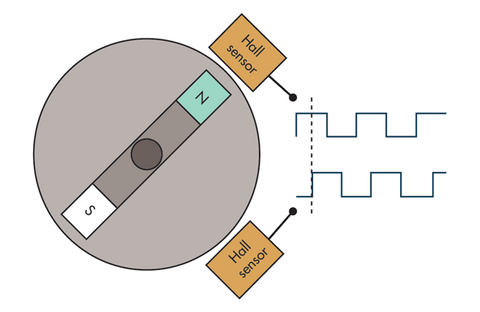
Hall Effect sensors werk gebaseer op die Hall -effek, wat die effek van 'n magnetiese veld is om 'n spanning te produseer. Hall Effect -sensors kan óf 'n digitale of lineêre uitset lewer, maar vir lineêre aktueerders gebruik hulle tipies digitale uitset -saal -effek sensors. As hierdie sensors 'n magnetiese veld opspoor, sal hulle 'n spanning produseer wat deur 'n beheerder gelees kan word [1]. Met lineêre aktuators word hierdie sensors in die ratkas van die aktuator saam met 'n magnetiese skyf geplaas. Terwyl die lineêre aktuator beweeg, draai hierdie magnetiese skyf verby die Hall Effect -sensor wat 'n pols van die spanning lewer. Hierdie pulse kan gebruik word om te bepaal Hoe ver die aktuator beweeg het. Oor die algemeen sal lineêre aktueerders wat Hall Effect -sensors gebruik om posisionele terugvoer te gee, die polsslag per duim wat u kan gebruik, spesifiseer om te bepaal hoe ver die aktuator beweeg. Byvoorbeeld, as u 6000 pulse opgespoor het en u aktuator 'n polsslag per duim van 12000 het, beteken dit dat u aktuator 0,5 duim beweeg het.
Die belangrikste nadeel van die gebruik van 'n Hall Effect -sensor vir posisionele terugvoer in vergelyking met 'n potensiometer is dat Hall Effect -sensors nie 'n absolute posisie meet nie. In plaas daarvan produseer hulle pulse wat getel kan word om te bepaal hoe ver die aktuator beweeg het, wat vereis dat u moet weet waar die aktuator die absolute posisie begin bepaal. Dit kan oorkom word in die sagteware van u beheerder, soos in 'n Arduino, deur die huidige posisie van die aktuator te stoor en die aktuator altyd vanuit 'n bekende posisie te begin, soos volledig teruggetrek. Dit kan vereis dat u die aktuator in hierdie bekende posisie moet huisves elke keer as u u stelsel aanskakel.
Die sterkte van die gebruik van 'n Hall Effect -sensor vir posisionele terugvoer is dat dit baie groter resolusie bied in vergelyking met die terugvoer van 'n potensiometer. Aangesien daar 1000s pulse per duim van beweging kan wees, bied Hall Effect -sensors 'n akkuraatheid en betroubaarheid in die posisionering van u lineêre aktuator. Die pulse sal ook in frekwensie verskil, gebaseer op die snelheid van u lineêre aktuator, wat beteken dat u dit kan gebruik om die snelheid van u lineêre aktuator te meet. Hall Effect -sensors bied ook 'n groter vermoë om te verseker dat veelvuldige lineêre aktuators gelyktydig saam beweeg, aangesien die poltellings meer akkuraat is as die veranderende spanning van die potensiometer. Gebruik ons FA-Sync-X Actuator-beheerder, kan u selfs verseker dat die aandrywers eenstemmig beweeg, ongeag die las.
Optiese sensor
Optiese sensors wat in lineêre aktueerders gebruik word (daar is 'n ander soort optiese sensors), funksioneer baie soortgelyk aan Hall Effect -sensors, behalwe dat dit lig opspoor met behulp van 'n fotodetektor [2]. Optiese sensors werk deur lig van 'n LED of 'n ander ligbron deur 'n enkodeerder -skyf te hê. Hierdie enkodeerderskyf is gesny om die lig periodiek daardeur te laat gaan. Aan die ander kant van die skyf is die fotodetektor, wat die lig opspoor as dit deur die gleuwe in die skyf gaan en 'n uitsetsein skep [3]. Terwyl die aktuator beweeg, draai die kodeerderskyf en word lig opgespoor deur die fotodetektor wat 'n pols van die spanning lewer. Hierdie pulse kan op dieselfde manier gebruik word as die pulse van 'n Hall Effect -sensor om te bepaal Hoe ver die aktuator beweeg het. Lineêre aktueerders wat optiese sensors gebruik vir posisionele terugvoer, sal ook die polsslag per duim wat u kan gebruik, spesifiseer om te bepaal hoe ver die aktuator beweeg.

Optiese sensors het weereens soortgelyke sterk punte en nadele as Hall Effect -sensors in vergelyking met potensiometers. Hulle het 'n groter akkuraatheid en resolusie, selfs groter as Hall Effect -sensors, en kan gebruik word om die snelheid van die lineêre aktuator te meet. Dit is ook beter om te verseker dat u veelvuldige lineêre aktuators gelyktydig beweeg en kan die gebruik van die FA-Sync-X Actuator-beheerder. Hulle meet ook nie 'n absolute posisie nie en vereis eerder dat u Pulse moet tel om te bepaal hoe ver u aktuator beweeg het. U moet ook in 'n bekende posisie begin, aangesien u die huidige posisie in sagteware moet stoor om die absolute posisie dop te hou.
Opsomming
U keuse van tipe terugvoer wat u van u wil hê Lineêre aktuator sal afhang van wat u voel belangriker is vir u aansoek. Het u 'n hoë vlak van akkuraatheid nodig? Kies 'n lineêre aktuator met optiese of Hall Effect -sensor. Wil u nie u aktuator op 'n tuisposisie instel elke keer as u dit aanskakel nie? Gaan dan met 'n lineêre aktuator met 'n potensiometer. Wil u verskeie lineêre aktueerders gelyktydig beheer? Kies 'n lineêre aktuator met optiese of Hall Effect -sensor. Wil u hê dat u terugvoer 'n absolute posisie moet bied? Gaan met 'n lineêre aktuator met 'n potensiometer.
[1] Monari, G. (Junie 2013) Begrip van resolusie in optiese en magnetiese enkodeerders. Ontsluit van: https://www.electronicdesign.com/technologies/components/article/21798142/understanding-resolution-in-optical-and-magnetic-encoders
[2] Paschotta, R. Artikel oor optiese sensors. Ontsluit van: https://www.rp-photonics.com/optical_sensors.html



